
L'ascesa dell'economia delle macchine: come il Web3 sta spingendo i robot a evolversi da strumenti a sistemi autonomi

Introduzione
Negli ultimi anni, l’industria della robotica ha vissuto un doppio punto di svolta sia tecnologico che commerciale. In passato, i robot erano visti principalmente come “strumenti”, dipendenti dalla gestione aziendale, incapaci di collaborare autonomamente e privi di capacità di agire economicamente. Tuttavia, con la fusione di nuove tecnologie come AI Agent, pagamenti on-chain (x402) e Machine Economy, l’ecosistema robotico si sta evolvendo da una competizione hardware unidimensionale a un sistema complesso multilivello composto da “corpo—intelligenza—pagamento—organizzazione”.
Ancora più degno di nota è il fatto che i mercati dei capitali globali stanno rapidamente valutando questa tendenza. JPMorgan prevede che, entro il 2050, il mercato dei robot umanoidi potrebbe raggiungere i 5 trilioni di dollari, stimolando ulteriormente la crescita delle industrie correlate come supply chain, manutenzione e servizi. Nello stesso anno, il numero di robot umanoidi in uso potrebbe superare il miliardo di unità. Questo significa che i robot passeranno da essere semplici apparecchiature industriali a veri e propri “partecipanti sociali su larga scala”.(1)
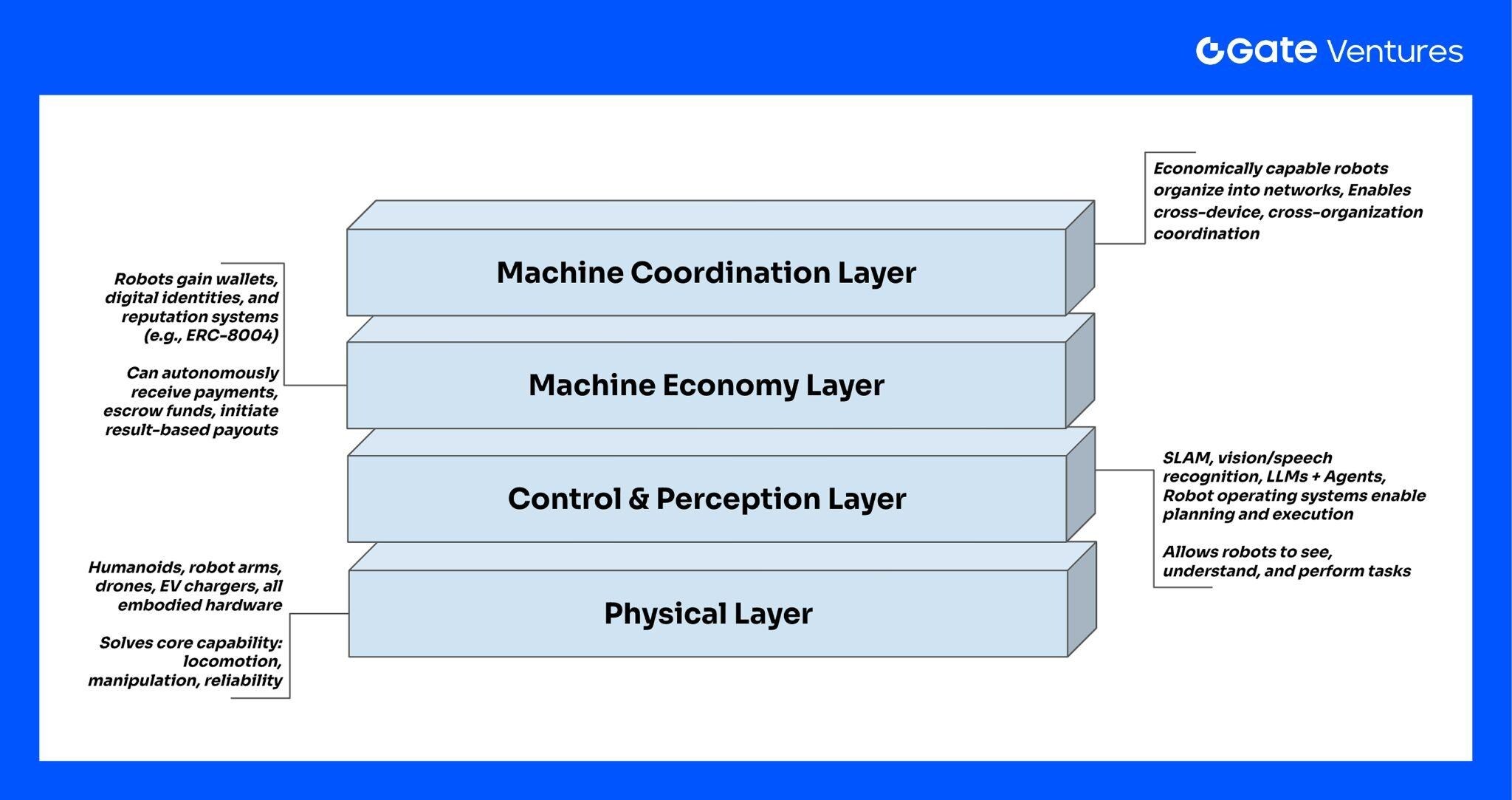
Per comprendere la direzione futura dell’industria robotica, possiamo suddividere l’intero ecosistema in quattro livelli strutturali chiari:
Source: Gate Ventures
Il primo livello è la base fisica (Physical Layer): include tutti i supporti incarnati come humanoid, bracci robotici, droni, colonnine di ricarica EV, ecc. Questi risolvono problemi di movimento e capacità operative di base, come camminare, afferrare, affidabilità meccanica e costi. Tuttavia, i robot di questo livello sono ancora “privi di capacità economica”, ovvero non possono completare autonomamente azioni come la riscossione, il pagamento o l’acquisto di servizi.
Il secondo livello è il livello di controllo e percezione (Control & Perception Layer): comprende la cibernetica robotica tradizionale, SLAM, sistemi di percezione, riconoscimento vocale e visivo, fino agli attuali LLM+Agent e ai sempre più numerosi sistemi operativi robotici con capacità di pianificazione astratta (come ROS, OpenMind OS). Questo livello permette alle macchine di “comprendere, vedere ed eseguire compiti”, ma attività economiche come pagamenti, contratti e identità devono ancora essere gestite dagli umani in back-end.
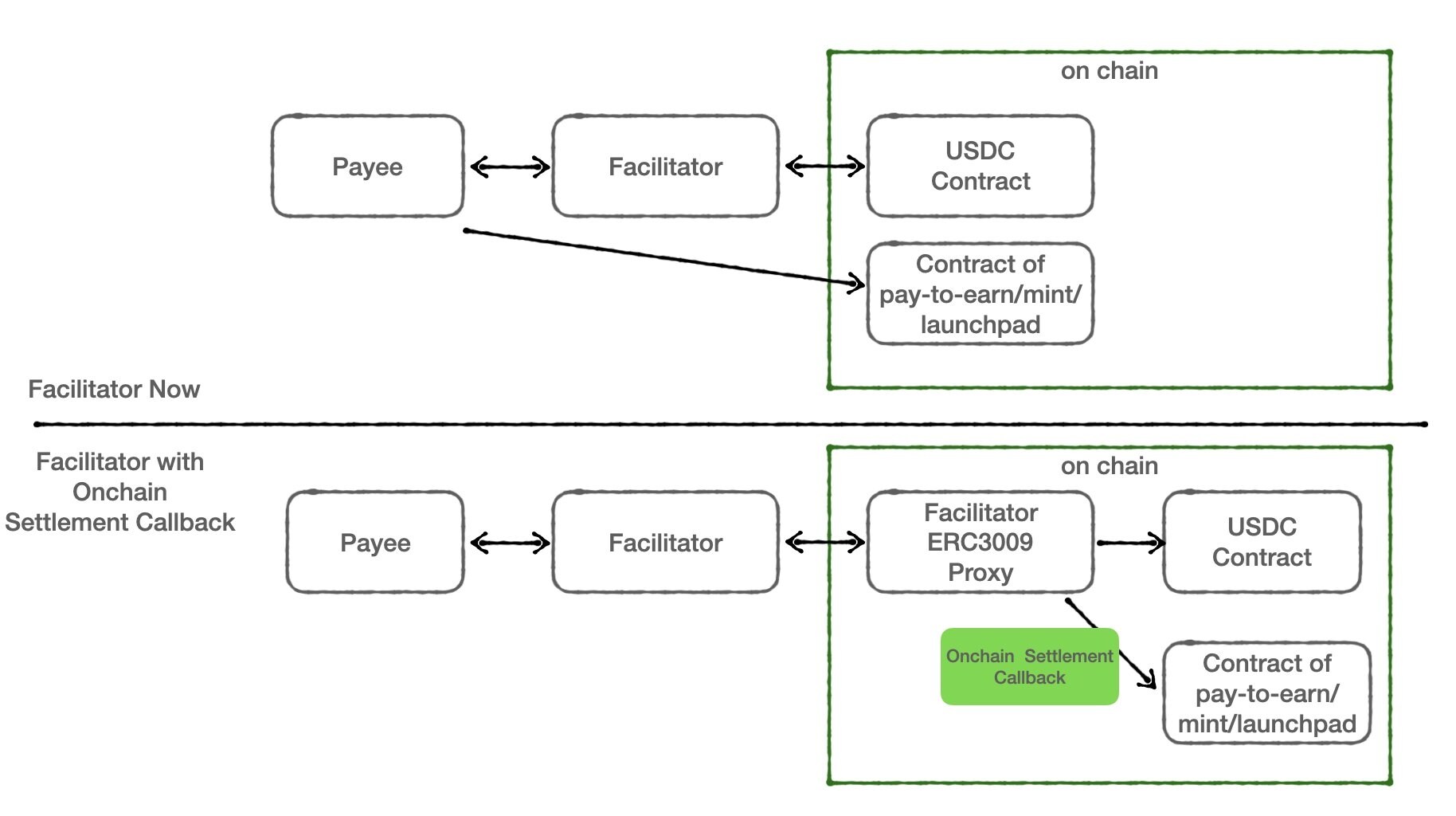
Il terzo livello è il livello di regolamento economico (Machine Economy Layer): la vera rivoluzione inizia qui. Le macchine iniziano ad avere portafogli, identità digitali, sistemi di reputazione (come ERC-8004) e, tramite x402, regolamenti on-chain, Onchain Callback e altri meccanismi, possono pagare direttamente per potenza di calcolo, dati, energia e diritti di passaggio; allo stesso tempo, possono ricevere autonomamente pagamenti per l’esecuzione di compiti, gestire fondi e avviare pagamenti basati sui risultati (result-based pay). Questo livello trasforma i robot da “beni aziendali” a “soggetti economici” in grado di partecipare al mercato.
Il quarto livello è il livello di coordinamento e governance (Machine Coordination Layer): quando molti robot acquisiscono capacità di pagamento e identità autonome, possono organizzarsi in flotte e reti—sciami di droni, reti di robot per la pulizia, reti energetiche EV, ecc. Possono regolare automaticamente i prezzi, pianificare i turni, fare offerte per i compiti, condividere i profitti e persino formare entità economiche autonome sotto forma di DAO.
Attraverso questa struttura a quattro livelli, possiamo vedere:
L’ecosistema robotico del futuro non sarà più solo una rivoluzione hardware, ma una ristrutturazione sistemica di “fisico + intelligenza + finanza + organizzazione”.
Questo ridefinisce non solo i limiti delle capacità delle macchine, ma anche i modi di catturare valore. Che si tratti di aziende robotiche, sviluppatori AI, fornitori di infrastrutture o protocolli di pagamento e identità nativi crypto, tutti troveranno il proprio ruolo nel nuovo sistema economico robotico.
Perché l’industria della robotica sta esplodendo proprio ora?
Negli ultimi decenni, l’industria della robotica è rimasta confinata a laboratori, fiere e scenari industriali specifici, sempre a un passo dalla vera commercializzazione su larga scala e dalla distribuzione sociale. Tuttavia, dopo il 2025, questo passo inizia a essere superato. Sia dai mercati dei capitali, dal grado di maturità tecnologica, sia dalle valutazioni di osservatori industriali come il CEO di Nvidia Jensen Huang, emerge un messaggio comune:
“The ChatGPT moment for general robotics is just around the corner”
Questa valutazione non è una semplice esagerazione pubblicitaria, ma si basa su tre segnali chiave del settore:
1. Maturità simultanea di capacità fondamentali come potenza di calcolo, modelli, simulazione, controllo della percezione
2. L’intelligenza robotica passa dal controllo chiuso a decisioni aperte guidate da LLM/Agent
3. Transizione dalla capacità della singola macchina a quella di sistema: i robot passeranno da “agenti attivi” a “collaborativi, comprensivi e capaci di operare economicamente”
Jensen Huang prevede addirittura che i robot umanoidi saranno ampiamente commercializzati nei prossimi 5 anni, una visione che si allinea strettamente con il comportamento dei mercati dei capitali e dell’industria nel 2025.
Lato capitale: i grandi finanziamenti dimostrano che il “punto di svolta robotico” è già stato valutato dal mercato
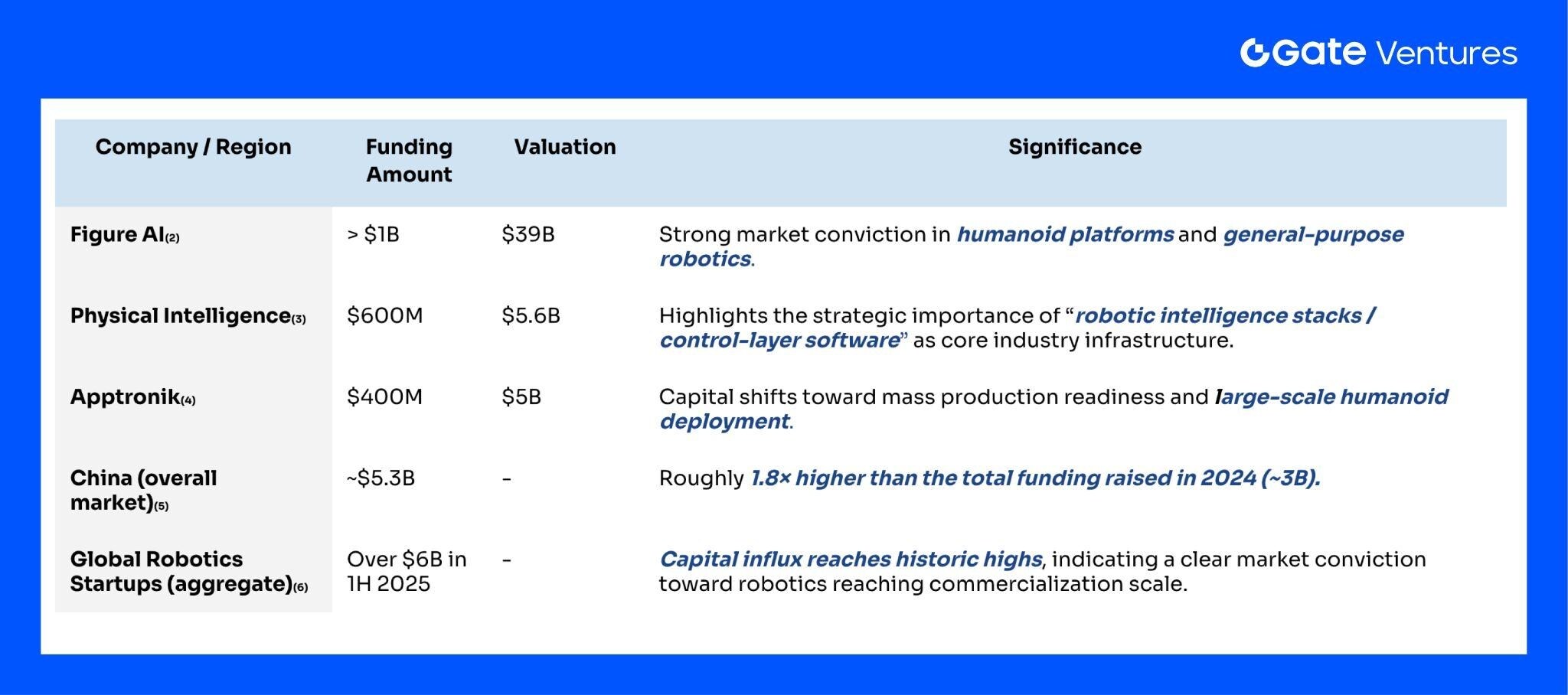
Nel 2024–2025, l’industria della robotica ha visto una densità e una scala di finanziamenti senza precedenti; solo nel 2025 si sono registrati diversi round di finanziamento superiori ai 500 milioni di dollari, tra cui:
Source: Gate Ventures
I capitali esprimono chiaramente: l’industria della robotica è arrivata alla fase di investimento verificabile.
Le caratteristiche comuni di questi finanziamenti:
● Non sono “finanziamenti concettuali”, ma puntano a linee di produzione, supply chain, intelligenza generale, implementazione commerciale
● Non sono progetti frammentari, ma architetture full-stack che integrano hardware e software, sistemi di servizio per l’intero ciclo di vita del robot
I capitali non scommettono a caso su scale da miliardi: dietro c’è la conferma della maturità industriale.
Lato tecnologico: svolte decisive avvengono simultaneamente
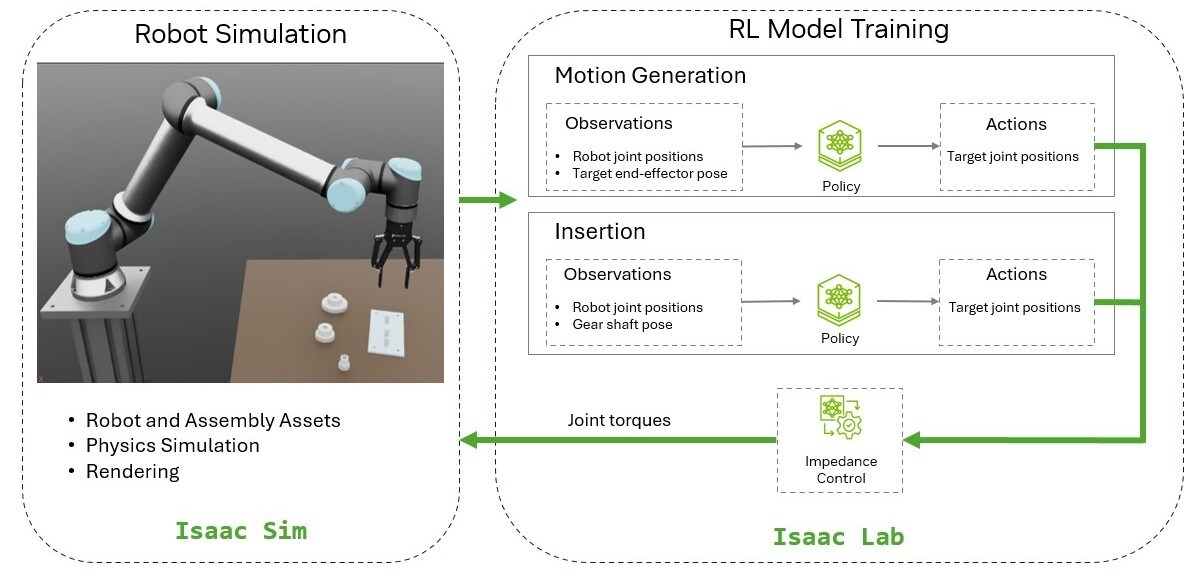
Nel 2025, l’industria della robotica ha vissuto una “convergenza tecnologica” storicamente rara. In primo luogo, le innovazioni di AI Agent e dei grandi modelli linguistici hanno trasformato i robot da “macchine operative” che eseguivano solo istruzioni in “agenti intelligenti comprensivi” in grado di comprendere il linguaggio, scomporre compiti e ragionare combinando visione e tatto. La percezione multimodale e i nuovi modelli di controllo (come RT-X, Diffusion Policy) hanno dato ai robot per la prima volta capacità di base vicine all’intelligenza generale.
Source: Nvidia
Nel frattempo, le tecnologie di simulazione e trasferimento stanno maturando rapidamente. Ambienti di simulazione ad alta fedeltà come Isaac e Rosie riducono notevolmente il divario tra simulazione e realtà, consentendo ai robot di addestrarsi su larga scala in ambienti virtuali a costi molto bassi e di trasferire in modo affidabile le competenze nel mondo reale. Questo risolve i colli di bottiglia fondamentali del passato: apprendimento lento, raccolta dati costosa e rischi elevati negli ambienti reali.
L’evoluzione dell’hardware è altrettanto cruciale. Componenti chiave come motori a coppia, moduli articolari e sensori stanno riducendo i costi grazie alla scala della supply chain; la rapida ascesa della Cina nella catena di fornitura globale dei robot ha ulteriormente aumentato la produttività del settore. Con l’avvio della produzione di massa da parte di molte aziende, i robot hanno finalmente una base industriale “replicabile e scalabile”.
Infine, i miglioramenti in affidabilità e struttura dei consumi energetici consentono ai robot di soddisfare davvero le soglie minime per le applicazioni commerciali. Un migliore controllo dei motori, sistemi di sicurezza ridondanti e sistemi operativi in tempo reale permettono ai robot di operare stabilmente a livello aziendale per lunghi periodi.
Tutti questi fattori consentono all’industria della robotica, per la prima volta, di passare dalla “fase demo da laboratorio” alla “implementazione reale su larga scala”. Questa è la ragione fondamentale per cui l’esplosione della robotica sta avvenendo ora.
Lato commerciale: da prototipi → produzione di massa → implementazione nel mondo reale
Il 2025 è anche l’anno in cui il percorso di commercializzazione dei robot appare per la prima volta chiaramente. Aziende leader come Apptronik, Figure, Tesla Optimus hanno annunciato piani di produzione di massa, segnando il passaggio dei robot umanoidi dalla fase di prototipo a quella industriale replicabile. Allo stesso tempo, molte aziende stanno avviando progetti pilota in scenari ad alta domanda come logistica di magazzino e automazione industriale, verificando l’efficienza e l’affidabilità dei robot in ambienti reali.
Con il miglioramento della capacità di produzione hardware, il modello “Operation-as-a-Service (OaaS)” sta iniziando a essere validato dal mercato. Le aziende non devono più sostenere costi di acquisto elevati una tantum, ma possono abbonarsi mensilmente ai servizi robotici, migliorando notevolmente la struttura del ROI. Questo modello è diventato un’innovazione commerciale chiave per la diffusione su larga scala dei robot.
Inoltre, il settore sta rapidamente colmando le lacune nei sistemi di servizio precedentemente mancanti, tra cui reti di manutenzione, fornitura di ricambi, piattaforme di monitoraggio remoto e gestione operativa. Con la maturazione di queste capacità, i robot stanno acquisendo tutte le condizioni necessarie per un’operatività continua e un ciclo commerciale chiuso.
In sintesi, il 2025 è un anno di svolta in cui la robotica passa dal “si può fare” al “si può vendere, si può usare, è accessibile”, con un percorso di commercializzazione che per la prima volta mostra un ciclo virtuoso sostenibile.
Web3 X Ecosistema Robotico
Con l’esplosione totale dell’industria robotica nel 2025, la tecnologia blockchain trova un posizionamento chiaro, fornendo diverse capacità chiave al sistema robotico. Il suo valore principale può essere riassunto in tre direzioni: i.) raccolta dati per la tecnologia robotica, ii.) rete di coordinamento tra dispositivi, e iii.) rete economica che consente ai robot di partecipare autonomamente al mercato.
Decentralizzazione + meccanismi di incentivazione tramite token: nuove fonti di dati per l’addestramento dei robot, ma la qualità dei dati dipende dal miglioramento del Data Engine back-end
Il collo di bottiglia principale per l’addestramento dei modelli Physical-AI è la scarsità di dati reali su larga scala, copertura di scenari e dati di interazione fisica di alta qualità. L’emergere di DePIN/DePAI consente a Web3 di offrire nuove soluzioni su “chi contribuisce ai dati e come contribuire in modo sostenibile”.
Tuttavia, secondo la ricerca accademica, i dati decentralizzati hanno potenziale in termini di scala e copertura, ma non sono automaticamente dati di alta qualità per l’addestramento: è ancora necessario un data engine back-end per selezione, pulizia e controllo dei bias prima di poterli usare per l’addestramento di grandi modelli.
Innanzitutto, Web3 risolve il problema della “motivazione all’offerta di dati”, non garantisce direttamente la “qualità dei dati”.
I dati di addestramento robotici tradizionali provengono principalmente da laboratori, piccole flotte o raccolte interne aziendali, con scala insufficiente.
Il modello DePIN/DePAI di Web3, tramite incentivi token, permette a utenti comuni, operatori di dispositivi o operatori remoti di diventare fornitori di dati, aumentando notevolmente la scala e la diversità delle fonti di dati.
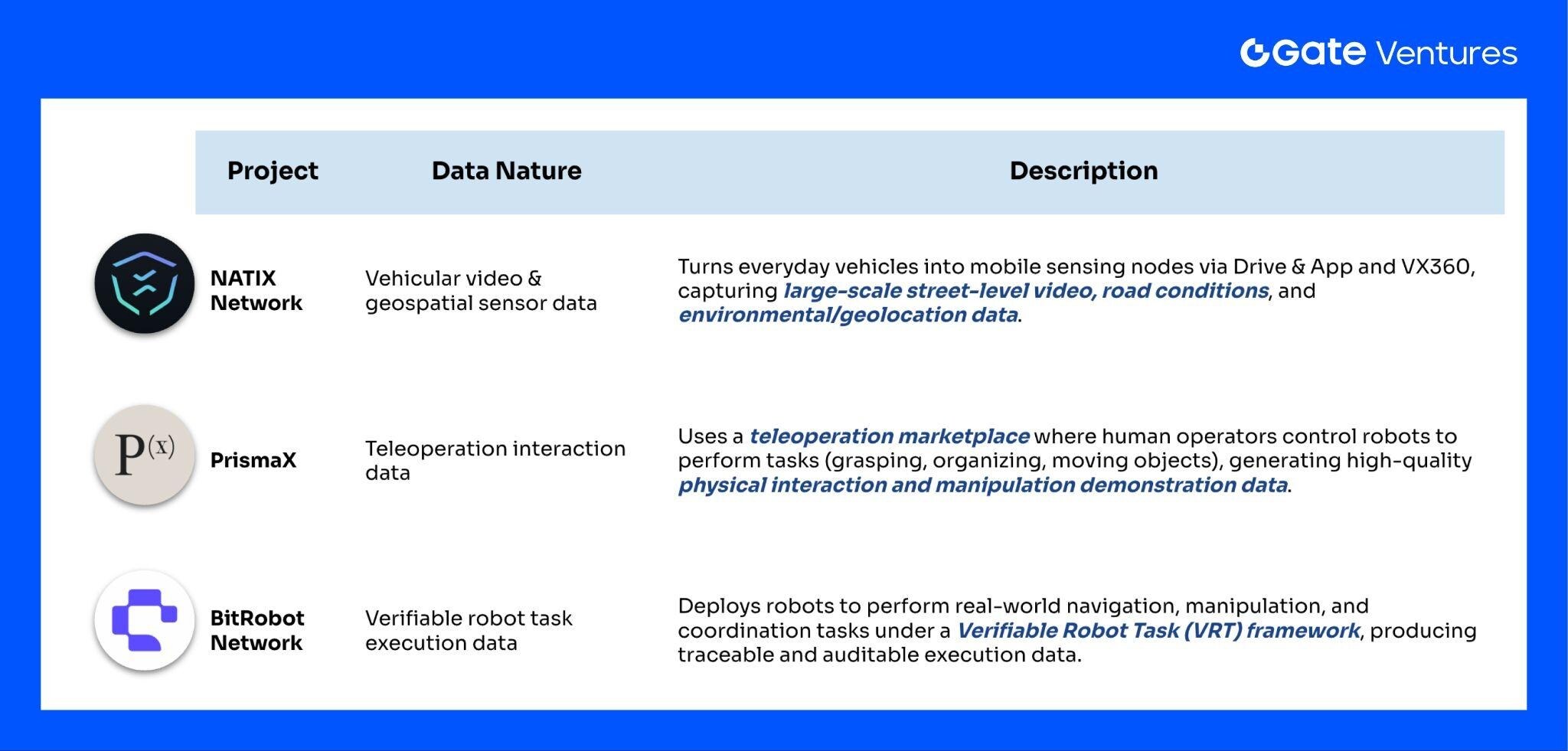
Progetti inclusi:
Source: Gate Ventures
● NATIX Network: tramite Drive& App e VX360 trasforma i veicoli comuni in nodi mobili di raccolta dati, acquisendo video, dati geografici e ambientali.
● PrismaX: raccoglie dati di interazione fisica robotica di alta qualità (afferrare, ordinare, spostare oggetti) tramite mercato di controllo remoto.
● BitRobot Network: consente ai nodi robotici di eseguire compiti verificabili (VRT), generando dati reali su operazioni, navigazione e comportamenti collaborativi.
Questi progetti dimostrano che Web3 può espandere efficacemente il lato dell’offerta di dati, colmando le lacune di scenari reali e casi di coda lunga difficilmente coperti dai sistemi tradizionali.
Ma secondo la ricerca accademica, i dati crowdsourced/decentralizzati presentano spesso problemi strutturali di “bassa accuratezza, alto rumore, grande bias”. Numerosi studi su crowdsourcing e mobile crowdsensing sottolineano:
1. Grandi fluttuazioni nella qualità dei dati, rumore e differenze di formato significative
Le differenze tra dispositivi, modalità operative e comprensione dei diversi contributori generano molti dati incoerenti, che richiedono rilevamento e filtraggio.
2. Bias strutturali diffusi
I partecipanti tendono a concentrarsi in aree/gruppi specifici, causando una distribuzione del campionamento non rappresentativa del mondo reale.
3. I dati crowdsourced grezzi non possono essere usati direttamente per l’addestramento dei modelli
Ricerche su guida autonoma, embodied AI e robotica sottolineano che dataset di alta qualità richiedono un processo completo: raccolta → revisione della qualità → allineamento ridondante → data augmentation → completamento della coda lunga → correzione della coerenza delle etichette, non “raccolta e uso immediato”. (7)
Pertanto, le reti dati Web3 offrono fonti di dati più ampie, ma “se possano essere usate direttamente per l’addestramento” dipende dall’ingegneria dati back-end.
Il vero valore di DePIN è fornire una base dati “continua, scalabile e a basso costo” per la Physical AI
Più che risolvere immediatamente il problema della precisione dei dati, Web3 risolve:
● “Chi è disposto a contribuire dati a lungo termine?”
● “Come incentivare più dispositivi reali a connettersi?”
● “Come trasformare la raccolta dati da centralizzata a una rete aperta e sostenibile?”
In altre parole, DePIN/DePAI fornisce la base per la scala e la copertura dei dati, rendendo Web3 un tassello importante del “livello di origine dati” nell’era della Physical AI, ma non l’unico garante della qualità dei dati.
Rete di coordinamento tra dispositivi: OS generici come base per la comunicazione tra robot
L’industria robotica sta passando dall’intelligenza della singola macchina alla collaborazione di gruppo, ma esiste un collo di bottiglia chiave: robot di marche, forme e stack tecnologici diversi non possono condividere informazioni, non sono interoperabili e manca un mezzo di comunicazione unificato. Questo fa sì che la collaborazione multi-robot dipenda da sistemi chiusi proprietari, limitando fortemente la distribuzione su larga scala.
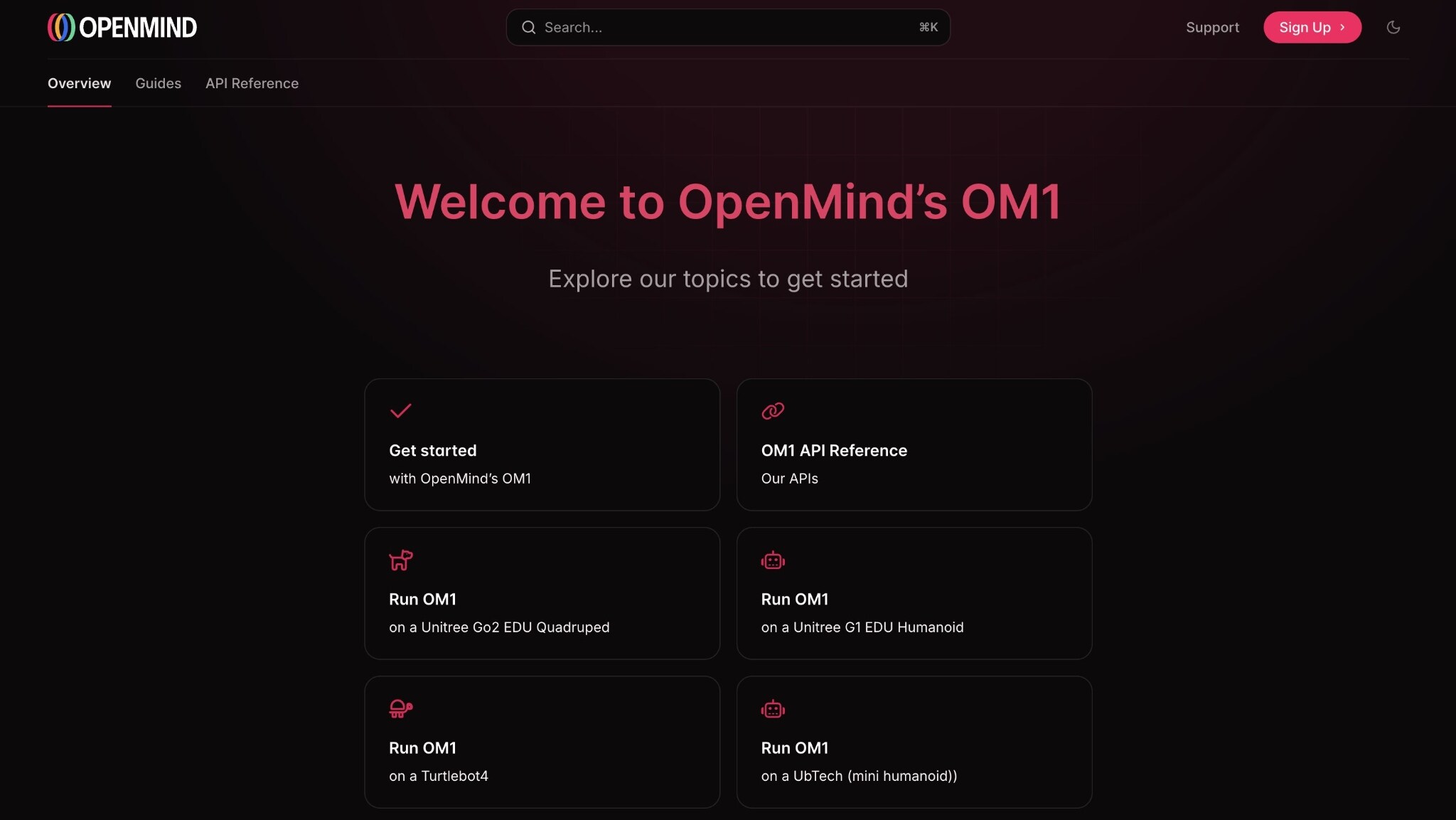
Negli ultimi anni, il livello di sistema operativo robotico generico (Robot OS Layer), rappresentato da OpenMind, sta offrendo nuove soluzioni a questo problema. Questi sistemi non sono “software di controllo” tradizionali, ma sistemi operativi intelligenti cross-device che, come Android per l’industria mobile, forniscono un linguaggio comune e infrastrutture pubbliche per comunicazione, cognizione, comprensione e collaborazione tra robot.(8)
Nell’architettura tradizionale, i sensori, i controller e i moduli di ragionamento di ogni robot sono isolati e non possono condividere informazioni semantiche tra dispositivi. Il livello di sistema operativo generico, invece, unificando le interfacce di percezione, i formati decisionali e le modalità di pianificazione dei compiti, consente ai robot di ottenere per la prima volta:
● Descrizione astratta dell’ambiente esterno (vision / sound / tactile → eventi semantici strutturati)
● Comprensione unificata dei comandi (linguaggio naturale → pianificazione delle azioni)
● Espressione multimodale condivisibile dello stato
È come dotare i robot di un livello cognitivo in grado di comprendere, esprimere e apprendere.
I robot non sono più “attuatori isolati”, ma dispongono di un’interfaccia semantica unificata e possono essere integrati in reti di collaborazione su larga scala.
Inoltre, la più grande innovazione degli OS generici è la “compatibilità cross-device”: per la prima volta robot di marche e forme diverse possono “parlare la stessa lingua”. Tutti i robot possono collegarsi allo stesso bus dati e interfaccia di controllo tramite lo stesso OS.
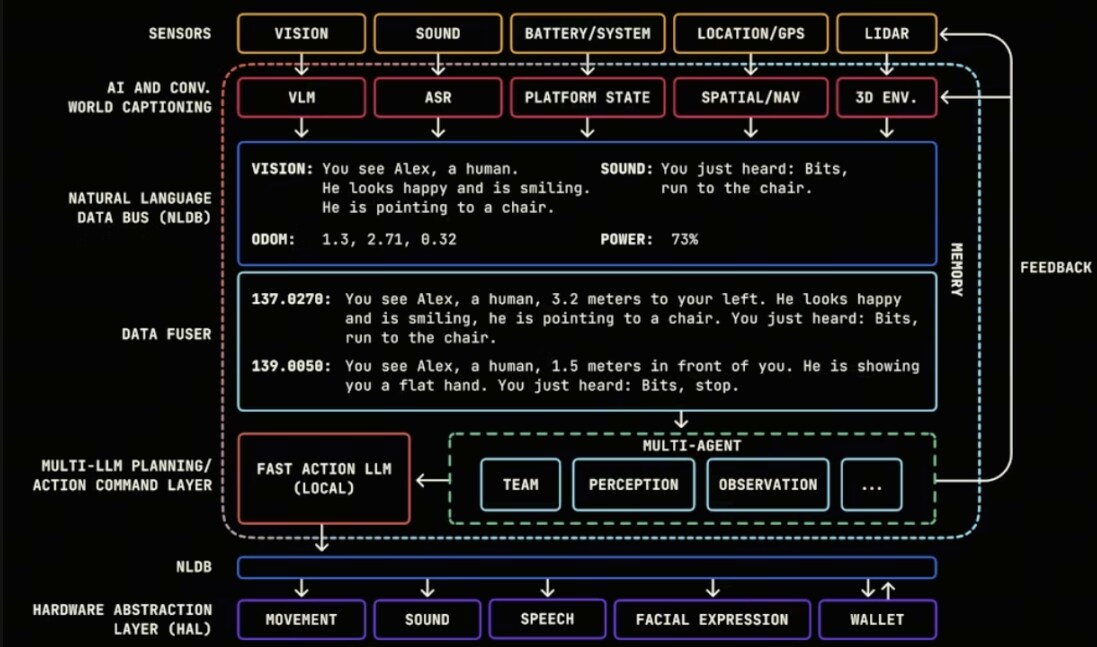
Source: Openmind
Questa capacità di interoperabilità cross-brand consente al settore di discutere per la prima volta di:
● Collaborazione multi-robot
● Offerta e pianificazione dei compiti
● Percezione condivisa / mappa condivisa
● Esecuzione congiunta di compiti cross-spazio
La premessa della collaborazione è “comprendere lo stesso formato informativo”: l’OS generico sta risolvendo questo problema di linguaggio di base.
Nell’ecosistema di collaborazione tra dispositivi, peaq rappresenta un’altra direzione infrastrutturale chiave: un livello di protocollo di base che fornisce ai robot identità verificabili, incentivi economici e capacità di coordinamento a livello di rete.(9)
Non risolve “come i robot comprendono il mondo”, ma “come i robot partecipano come individui alla collaborazione di rete”.
Le sue caratteristiche principali includono:
1. Identità della macchina
peaq fornisce registrazione di identità decentralizzata per robot, dispositivi e sensori, consentendo loro di:
● Accedere come individui indipendenti a qualsiasi rete
● Partecipare a sistemi di assegnazione compiti e reputazione affidabili
Questa è la condizione preliminare per diventare “nodi di rete”.
2. Conti economici autonomi
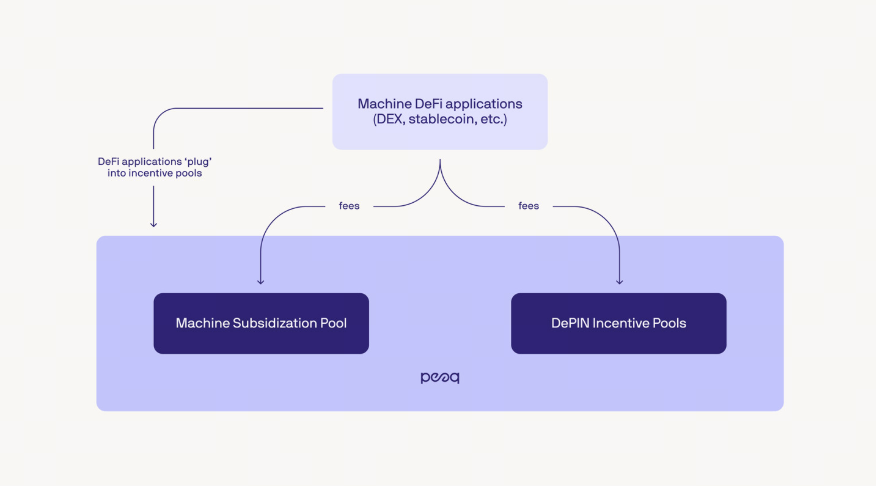
Source: Peaq
I robot acquisiscono autonomia economica. Grazie al supporto nativo per pagamenti in stablecoin e logiche di fatturazione automatica, i robot possono riconciliare e pagare automaticamente senza intervento umano, inclusi:
● Regolamento dei dati dei sensori in base al consumo
● Pagamento per chiamate di potenza di calcolo e inferenza di modelli
● Regolamento immediato per servizi tra robot (trasporto, consegna, ispezione)
● Ricarica autonoma, affitto di spazi e altre chiamate infrastrutturali
Inoltre, i robot possono utilizzare pagamenti condizionali:
● Completamento del compito → pagamento automatico
● Risultato insoddisfacente → fondi automaticamente bloccati o restituiti
Questo rende la collaborazione tra robot affidabile, auditabile e arbitrabile automaticamente, una capacità chiave per la distribuzione commerciale su larga scala.
Inoltre, i ricavi generati dai servizi e dalle risorse fornite dai robot nel mondo reale possono essere tokenizzati e mappati on-chain, rendendo il loro valore e flusso di cassa trasparenti, tracciabili, negoziabili e programmabili, costruendo così una rappresentazione patrimoniale a soggetto macchina.
Con la maturazione di AI e sistemi on-chain, l’obiettivo è consentire alle macchine di guadagnare, pagare, prendere in prestito e investire autonomamente, effettuare transazioni M2M e formare reti economiche auto-organizzate, realizzando collaborazione e governance in forma DAO.
3. Coordinamento dei compiti tra dispositivi
A un livello superiore, peaq fornisce un quadro di coordinamento tra macchine, consentendo loro di:
● Condividere informazioni di stato e disponibilità
● Partecipare a gare e abbinamenti di compiti
● Gestire risorse (potenza di calcolo, capacità di movimento, capacità di percezione)
Così i robot possono collaborare come una rete di nodi, invece di operare isolatamente. Solo quando linguaggio e interfacce sono unificati, i robot possono davvero entrare in una rete collaborativa, invece di restare in ecosistemi chiusi.
OpenMind e altri OS intelligenti cross-device cercano di standardizzare il modo in cui i robot “comprendono il mondo e i comandi”; Peaq e altre reti di coordinamento Web3 esplorano come consentire a dispositivi diversi di ottenere capacità di collaborazione organizzata verificabile in una rete più ampia. Sono solo rappresentanti di molteplici tentativi, riflettendo la tendenza dell’intero settore verso livelli di comunicazione unificati e sistemi di interoperabilità aperti.
Rete economica che consente ai robot di partecipare autonomamente al mercato
Se i sistemi operativi cross-device risolvono il “come comunicare” tra robot e le reti di coordinamento il “come collaborare”, l’essenza della rete economica delle macchine è trasformare la produttività robotica in flussi di capitale sostenibili, consentendo ai robot di pagare autonomamente per il proprio funzionamento e chiudere il ciclo.
Un tassello chiave a lungo mancante nell’industria robotica è la “capacità economica autonoma”. I robot tradizionali possono solo eseguire istruzioni preimpostate, ma non possono gestire risorse esterne, fissare prezzi per i propri servizi o regolare i costi. In scenari complessi, devono affidarsi alla contabilità, approvazione e gestione umana, riducendo notevolmente l’efficienza collaborativa e rendendo difficile la distribuzione su larga scala.
x402: conferisce ai robot lo “status di soggetto economico”
Source: X@CPPP2443_
x402, come nuovo standard di Agentic Payment, fornisce questa capacità fondamentale ai robot. I robot possono inviare richieste di pagamento tramite HTTP e completare regolamenti atomici con stablecoin programmabili come USDC. Questo significa che i robot possono non solo completare compiti, ma anche acquistare autonomamente tutte le risorse necessarie:
● Chiamate di potenza di calcolo (inferenza LLM / inferenza modello di controllo)
● Accesso a scenari e noleggio di dispositivi
● Servizi di altri robot
Per la prima volta, i robot possono consumare e produrre autonomamente come soggetti economici.
Negli ultimi anni, sono emersi casi rappresentativi di collaborazione tra produttori di robot e infrastrutture crypto, dimostrando che la rete economica delle macchine sta passando dal concetto all’implementazione.
OpenMind × Circle: i robot possono supportare nativamente i pagamenti in stablecoin

Source: Openmind
OpenMind ha integrato il suo OS robotico cross-device con USDC di Circle, consentendo ai robot di effettuare pagamenti e regolamenti in stablecoin direttamente nella catena di esecuzione dei compiti.
Questo rappresenta due svolte:
1. La catena di esecuzione dei compiti robotici può integrare nativamente il regolamento finanziario, senza dipendere dai sistemi di back-end
2. I robot possono effettuare “pagamenti senza frontiere” in ambienti cross-platform e cross-brand
Per la collaborazione tra robot, questa è una capacità fondamentale verso entità economiche autonome.
Kite AI: costruire una blockchain agent-native per l’economia delle macchine
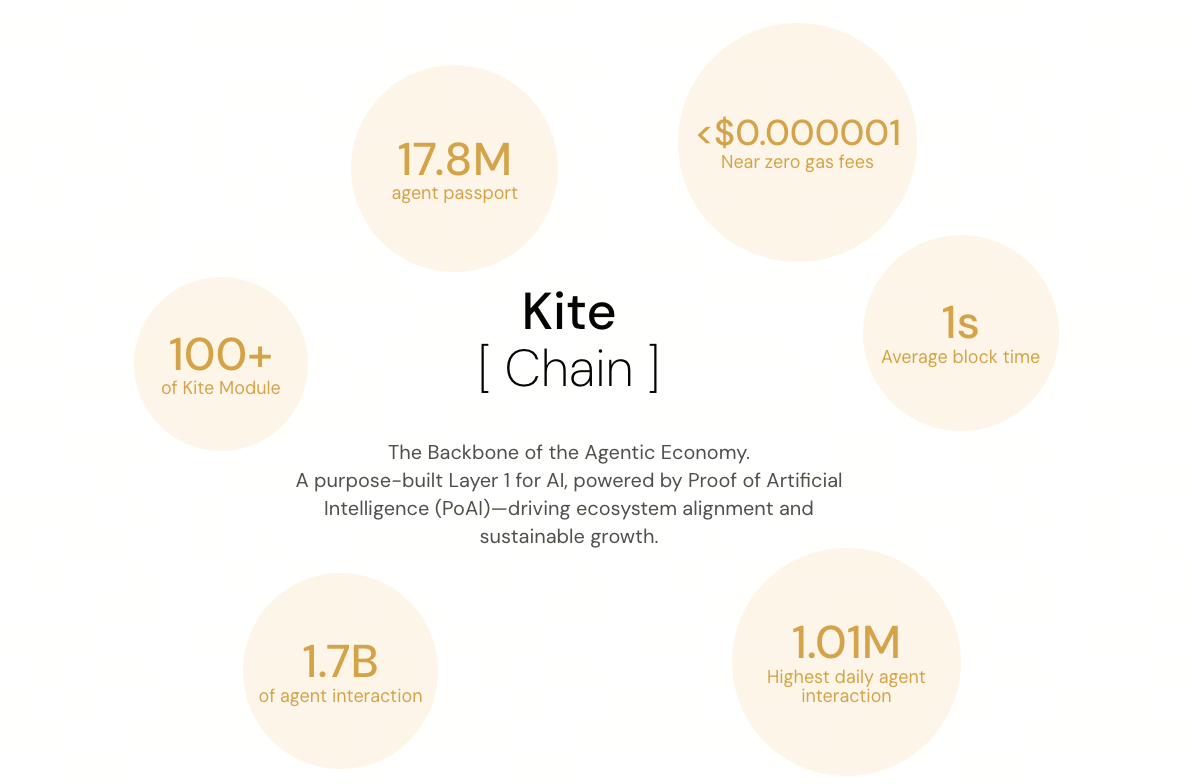
Source: Kite AI
Kite AI spinge ulteriormente la struttura di base dell’economia delle macchine: è progettata per agenti AI, con identità on-chain, portafogli componibili, sistemi di pagamento e regolamento automatizzati, consentendo agli agenti di eseguire autonomamente varie transazioni on-chain. (10)
Fornisce un ambiente operativo economico “autonomo per agenti”, perfettamente in linea con l’obiettivo dei robot di partecipare autonomamente al mercato.
1. Livello di identità Agent / Macchina (Kite Passport): ogni AI Agent (in futuro anche robot specifici) riceve un’identità crittografica e un sistema multilivello di chiavi, consentendo un controllo preciso su “chi spende” e “chi rappresenta”, con possibilità di revoca e responsabilità, prerequisito per considerare l’Agent come soggetto economico indipendente.
2. Stablecoin nativa + x402 integrato: Kite integra lo standard di pagamento x402 a livello di chain, utilizzando USDC e altre stablecoin come asset di regolamento predefiniti, consentendo agli Agent di completare invio, ricezione e riconciliazione tramite intent standardizzati, ottimizzato per scenari di pagamento ad alta frequenza, basso importo e machine-to-machine (con conferma sub-secondo, basse commissioni, auditabilità).
3. Vincoli e governance programmabili: tramite policy on-chain, è possibile impostare limiti di spesa, whitelist di merchant/contratti, regole di risk management e tracciabilità audit, trovando un equilibrio tra sicurezza e autonomia nell’“aprire un portafoglio alle macchine”.
In altre parole, se l’OS di OpenMind consente ai robot di “comprendere il mondo e collaborare”, l’infrastruttura blockchain di Kite AI consente ai robot di “sopravvivere nel sistema economico”.
Grazie a queste tecnologie, la rete economica delle macchine costruisce “incentivi alla collaborazione” e “ciclo di valore chiuso”, consentendo ai robot non solo di “pagare”, ma anche di:
● Ottenere entrate in base alle prestazioni (regolamento basato sui risultati)
● Acquistare risorse secondo necessità (struttura dei costi autonoma)
● Partecipare alla competizione di mercato con reputazione on-chain (adempimento verificabile)
Per la prima volta, i robot possono partecipare a un sistema completo di incentivi economici: possono lavorare → guadagnare → spendere → ottimizzare autonomamente il proprio comportamento.
Conclusione
Prospettive
Guardando alle tre direzioni sopra descritte, il ruolo di Web3 nell’industria robotica sta diventando sempre più chiaro:
● Livello dati: fornisce motivazione per la raccolta dati su larga scala e da più fonti, migliorando la copertura degli scenari di coda lunga;
● Livello collaborazione: introduce identità unificate, interoperabilità e meccanismi di governance dei compiti per la collaborazione cross-device;
● Livello economico: tramite pagamenti on-chain e regolamenti verificabili, fornisce ai robot un quadro di comportamento economico programmabile.
Queste capacità gettano insieme le basi per una potenziale Internet delle macchine del futuro, consentendo ai robot di collaborare e operare in un ambiente tecnologico più aperto e auditabile.
Incertezze
Sebbene l’ecosistema robotico abbia raggiunto una svolta senza precedenti nel 2025, il passaggio dalla “fattibilità tecnica” alla “scalabilità e sostenibilità” è ancora soggetto a molteplici incertezze. Queste non derivano da un singolo collo di bottiglia tecnologico, ma da un complesso intreccio di fattori ingegneristici, economici, di mercato e normativi.
La fattibilità economica è davvero raggiunta?
Nonostante i progressi in percezione, controllo e intelligenza, la distribuzione su larga scala dei robot dipende ancora dalla domanda commerciale reale e dal ritorno economico. Attualmente, la maggior parte dei robot umanoidi e generici è ancora in fase pilota e di verifica; manca ancora una base dati a lungo termine su quanto le aziende siano disposte a pagare per i servizi robotici e se i modelli OaaS/RaaS possano garantire un ROI stabile nei diversi settori.
Inoltre, il vantaggio di costo-efficacia dei robot in ambienti complessi e non strutturati non è ancora del tutto consolidato. In molti casi, le soluzioni di automazione tradizionale o la sostituzione umana sono ancora più economiche e affidabili. Questo significa che la fattibilità tecnica non si traduce automaticamente in necessità economica, e l’incertezza nel ritmo della commercializzazione influenzerà direttamente la velocità di espansione dell’intero settore.
Sfide sistemiche di affidabilità ingegneristica e complessità operativa
La sfida più grande per l’industria robotica non è spesso “se il compito può essere completato”, ma se può essere svolto a lungo termine, in modo stabile e a basso costo. Nella distribuzione su larga scala, tassi di guasto hardware, costi di manutenzione, aggiornamenti software, gestione energetica, sicurezza e responsabilità possono rapidamente diventare rischi sistemici.
Anche se il modello OaaS riduce la spesa in conto capitale iniziale, i costi nascosti in manutenzione, assicurazione, responsabilità e conformità possono erodere il modello di business complessivo. Se l’affidabilità non supera la soglia minima per gli scenari commerciali, le reti robotiche e l’economia delle macchine resteranno solo ipotesi.
Coordinamento dell’ecosistema, convergenza degli standard e adattamento normativo
L’ecosistema robotico sta vivendo una rapida evoluzione di OS, framework Agent, protocolli blockchain e standard di pagamento, ma è ancora altamente frammentato. I costi di collaborazione cross-device, cross-vendor e cross-system sono elevati e gli standard generali non sono ancora completamente convergenti, il che può portare a frammentazione, duplicazione degli sforzi e perdita di efficienza.
Nel frattempo, i robot con capacità decisionali ed economiche autonome stanno sfidando i quadri normativi e legali esistenti: responsabilità, conformità dei pagamenti, confini di dati e sicurezza sono ancora poco chiari. Se le normative e gli standard non si evolvono insieme alla tecnologia, la rete economica delle macchine dovrà affrontare incertezze di conformità e implementazione.
In sintesi, le condizioni per l’applicazione su larga scala dei robot si stanno gradualmente formando e il prototipo del sistema economico delle macchine sta emergendo nella pratica industriale. Web3 × Robotics è ancora in una fase iniziale, ma mostra già un potenziale di sviluppo a lungo termine degno di attenzione.
Articoli di riferimento
Esclusione di responsabilità: il contenuto di questo articolo riflette esclusivamente l’opinione dell’autore e non rappresenta in alcun modo la piattaforma. Questo articolo non deve essere utilizzato come riferimento per prendere decisioni di investimento.
Ti potrebbe interessare anche
XRP si mantiene forte mentre la domanda istituzionale aumenta
CZ sollecita la protezione degli utenti dai wallet truffa dopo il furto di 50 milioni di USDT
