
L’essor de l’économie des machines : comment le Web3 pousse les robots à évoluer d’outils vers des systèmes autonomes

Introduction
Ces dernières années, l'industrie de la robotique a connu un double tournant, à la fois technologique et commercial. Autrefois, les robots étaient principalement considérés comme des "outils", dépendant de la gestion en back-end des entreprises, incapables de collaborer de manière autonome et dépourvus de capacité d'agir économiquement. Mais avec la convergence de nouvelles technologies telles que les AI Agent, les paiements on-chain (x402) et la Machine Economy, l'écosystème robotique évolue d'une simple compétition matérielle vers un système complexe à plusieurs couches composé de "corps — intelligence — paiement — organisation".
Plus important encore, les marchés mondiaux du capital évaluent rapidement cette tendance. JPMorgan prévoit qu'à l'horizon 2050, le marché des robots humanoïdes pourrait atteindre 5 trillions de dollars, stimulant par la même occasion la croissance des industries connexes telles que la chaîne d'approvisionnement, la maintenance et les services. La même année, le nombre de robots humanoïdes en service pourrait dépasser 1 milliard d'unités. Cela signifie que les robots passeront du statut d'équipement industriel à celui de véritables "participants sociaux à grande échelle".(1)
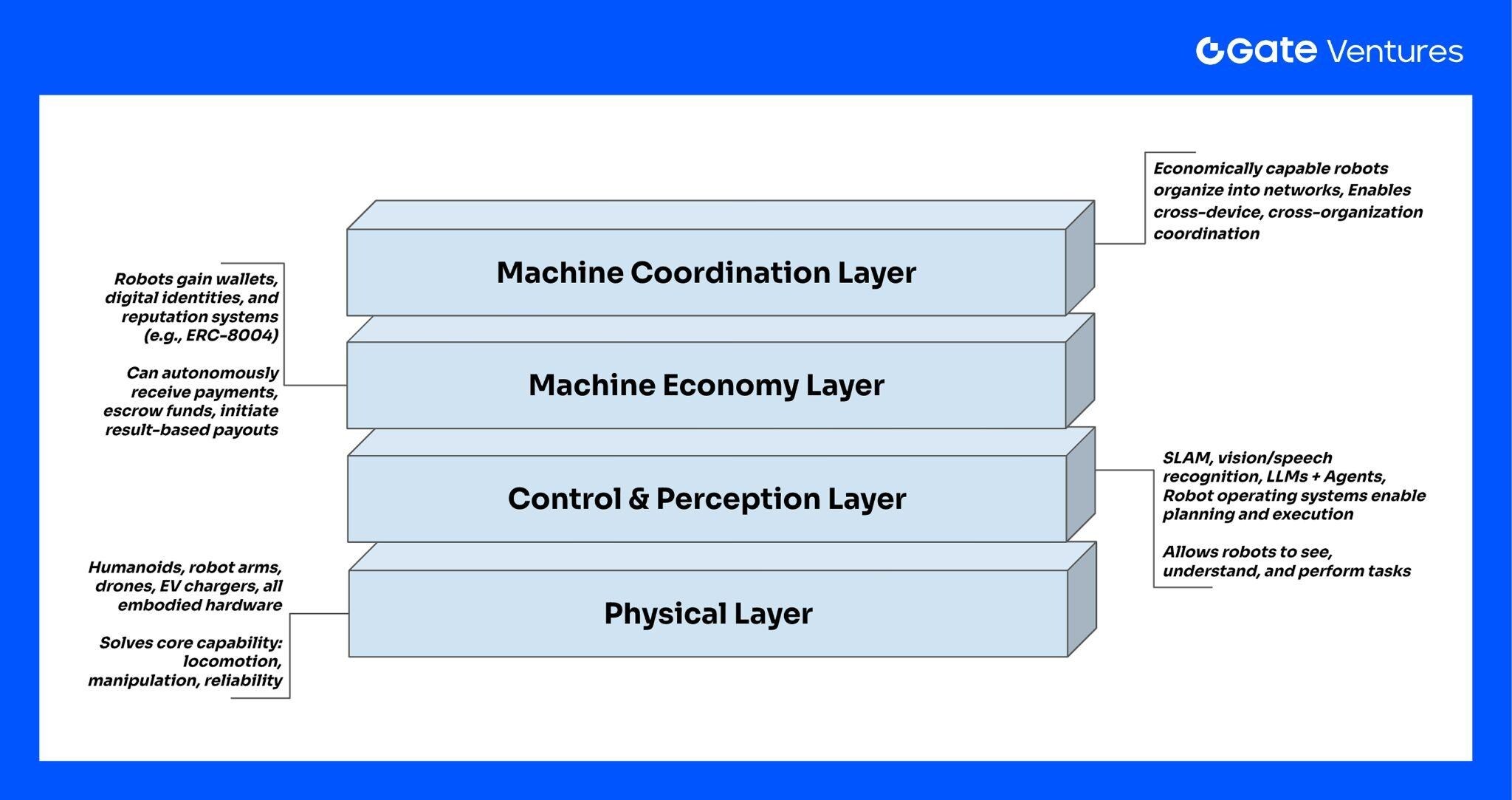
Pour comprendre la direction future de l'industrie robotique, nous pouvons considérer l'ensemble de l'écosystème comme une structure à quatre niveaux distincts :
Source: Gate Ventures
Le premier niveau est la couche physique (Physical Layer) : elle comprend les humanoïdes, bras robotiques, drones, bornes de recharge EV et tous les supports incarnés. Ils répondent aux besoins fondamentaux de mouvement et de capacité opérationnelle, tels que la marche, la préhension, la fiabilité mécanique et le coût. Cependant, à ce stade, ces machines restent "sans capacité économique", c'est-à-dire incapables d'effectuer de manière autonome des actions telles que facturer, payer ou acheter des services.
Le deuxième niveau est la couche de contrôle et de perception (Control & Perception Layer) : elle englobe la cybernétique robotique traditionnelle, le SLAM, les systèmes de perception, la reconnaissance vocale et visuelle, jusqu'aux LLM+Agent actuels, ainsi qu'aux systèmes d'exploitation robotiques de plus en plus capables de planification abstraite (tels que ROS, OpenMind OS). Cette couche permet aux machines de "comprendre, voir, exécuter des tâches", mais les activités économiques telles que le paiement, les contrats et l'identité doivent encore être gérées en back-end par des humains.
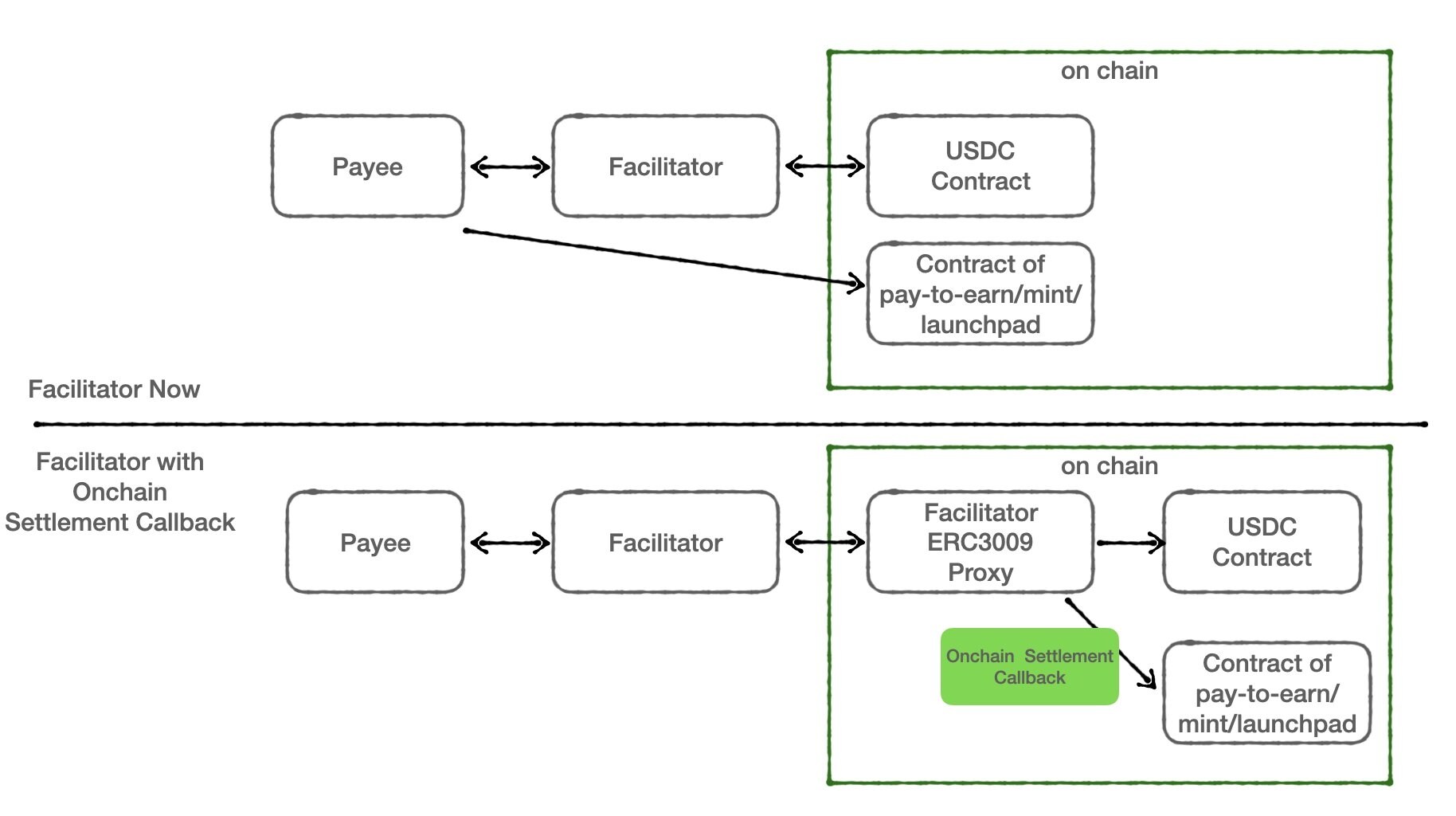
Le troisième niveau est la couche de règlement économique (Machine Economy Layer) : c'est ici que commence la véritable transformation. Les machines commencent à posséder des portefeuilles, des identités numériques, des systèmes de réputation (comme ERC-8004), et peuvent payer directement pour la puissance de calcul, les données, l'énergie ou le droit de passage via des mécanismes tels que x402, le règlement on-chain, ou Onchain Callback ; elles peuvent également recevoir des paiements pour l'exécution de tâches, gérer des fonds et initier des paiements basés sur les résultats (result-based pay). Cette couche permet aux robots de passer du statut "d'actif d'entreprise" à celui "d'acteur économique", capables de participer au marché.
Le quatrième niveau est la couche de coordination et de gouvernance (Machine Coordination Layer) : lorsque de nombreux robots disposent de paiements et d'identités autonomes, ils peuvent s'organiser en flottes et réseaux — essaims de drones, réseaux de robots de nettoyage, réseaux énergétiques EV, etc. Ils peuvent ajuster automatiquement les prix, planifier les horaires, enchérir sur des tâches, partager les revenus, voire former des entités économiques autonomes sous forme de DAO.
À travers ces quatre couches, nous pouvons constater :
L'écosystème robotique du futur ne sera plus seulement une révolution matérielle, mais une refonte systémique "physique + intelligence + finance + organisation".
Cela redéfinit non seulement les limites des capacités des machines, mais aussi les modes de captation de valeur. Que ce soit pour les entreprises robotiques, les développeurs d'IA, les fournisseurs d'infrastructures ou les protocoles natifs de paiement et d'identité crypto, chacun trouvera sa place dans le nouveau système économique robotique.
Pourquoi l'industrie robotique explose-t-elle maintenant ?
Au cours des dernières décennies, l'industrie robotique est restée cantonnée aux laboratoires, aux salons et à des scénarios industriels spécifiques, toujours à un pas de la commercialisation et du déploiement social à grande échelle. Cependant, après 2025, ce pas commence à être franchi. Que ce soit du point de vue des marchés financiers, de la maturité technologique ou des observateurs de l'industrie comme Jensen Huang, CEO de Nvidia, tous envoient le même signal :
“The ChatGPT moment for general robotics is just around the corner”
Ce constat n'est pas une exagération marketing, mais repose sur trois signaux industriels clés :
1. La maturité simultanée des fondamentaux : puissance de calcul, modèles, simulation, contrôle de la perception
2. L'intelligence robotique passe du contrôle fermé à la prise de décision ouverte pilotée par LLM/Agent
3. Transition de la capacité individuelle à la capacité systémique : les robots passent de "pouvoir agir" à "pouvoir collaborer, comprendre et opérer économiquement"
Jensen Huang va même jusqu'à prédire que les robots humanoïdes seront largement commercialisés dans les 5 prochaines années, une vision en phase avec les tendances du marché et de l'industrie prévues pour 2025.
Du côté du capital : des financements massifs prouvent que le "point d'inflexion robotique" est déjà valorisé par le marché
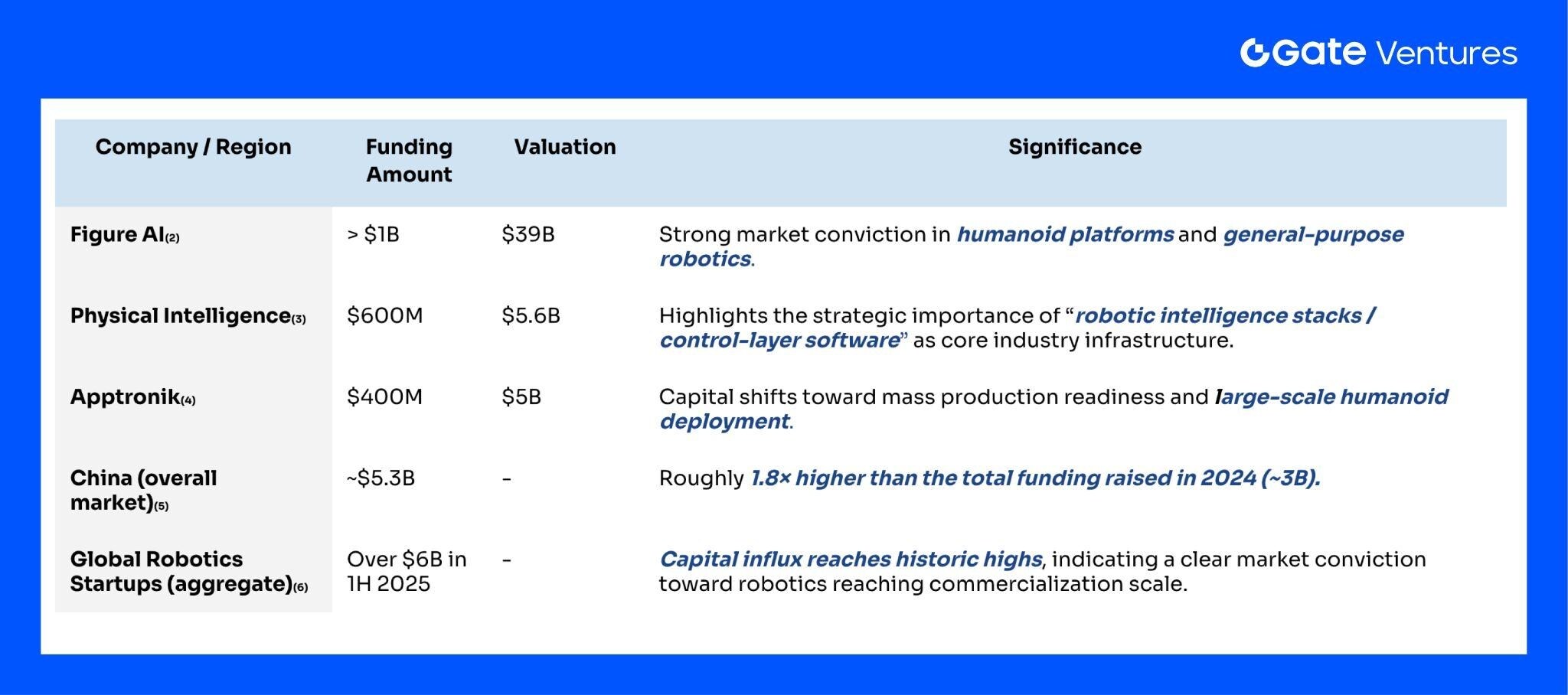
En 2024–2025, l'industrie robotique connaît une densité et une ampleur de financements sans précédent, avec plusieurs levées de fonds dépassant 500 millions de dollars rien qu'en 2025. Parmi les événements marquants :
Source: Gate Ventures
Le capital exprime clairement : l'industrie robotique est entrée dans une phase d'investissement vérifiable.
Caractéristiques communes de ces financements :
● Il ne s'agit pas de "financements conceptuels", mais d'investissements dans les lignes de production, la chaîne d'approvisionnement, l'intelligence générale et le déploiement commercial
● Il ne s'agit pas de projets isolés, mais d'architectures full-stack combinant matériel et logiciel, couvrant l'ensemble du cycle de vie des robots
Le capital ne parie pas sans raison sur des montants de plusieurs milliards ; cela reflète une reconnaissance de la maturité industrielle.
Du côté technologique : des percées décisives apparaissent simultanément
En 2025, l'industrie robotique connaît une "convergence technologique" historique. D'abord, les avancées des AI Agent et des grands modèles linguistiques permettent aux robots de passer du statut de "machines opérables" exécutant des instructions à celui d'"agents intelligents compréhensifs" capables de comprendre le langage, de décomposer les tâches et de raisonner en combinant vision et toucher. La perception multimodale et les nouveaux modèles de contrôle (tels que RT-X, Diffusion Policy) dotent les robots de capacités proches de l'intelligence générale.
Source: Nvidia
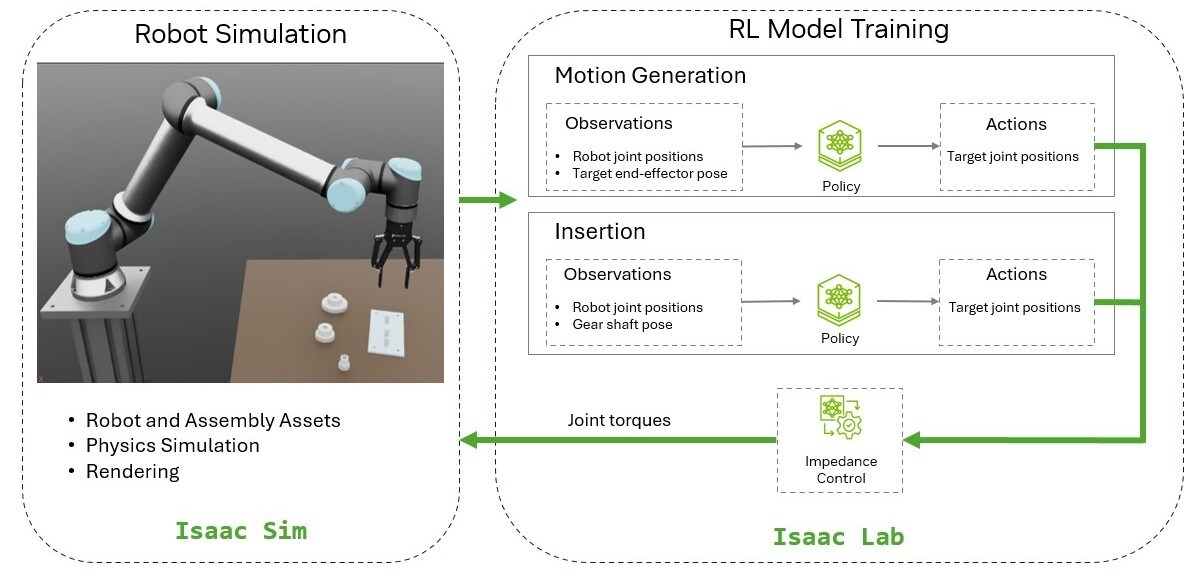
Parallèlement, les technologies de simulation et de transfert progressent rapidement. Des environnements de simulation haute fidélité comme Isaac et Rosie réduisent considérablement l'écart entre simulation et réalité, permettant aux robots de s'entraîner massivement à faible coût dans des environnements virtuels et de transférer ces compétences de manière fiable dans le monde réel. Cela résout le goulot d'étranglement fondamental de l'apprentissage lent, du coût élevé de la collecte de données et des risques dans l'environnement réel.
L'évolution du matériel est tout aussi cruciale. Les composants clés tels que les moteurs couple, modules d'articulation et capteurs voient leurs coûts baisser grâce à la montée en puissance de la chaîne d'approvisionnement, la Chine accélérant encore la productivité mondiale dans ce secteur. Avec le lancement de la production de masse par plusieurs entreprises, les robots disposent pour la première fois d'une base industrielle "réplicable et déployable à grande échelle".
Enfin, les améliorations en termes de fiabilité et de structure énergétique permettent aux robots de satisfaire aux exigences minimales des applications commerciales. Un meilleur contrôle moteur, des systèmes de sécurité redondants et des systèmes d'exploitation temps réel assurent un fonctionnement stable à long terme dans des environnements d'entreprise.
Ces facteurs réunis offrent pour la première fois à l'industrie robotique toutes les conditions nécessaires pour passer de la "phase de démonstration en laboratoire" à un "déploiement réel à grande échelle". C'est la raison fondamentale de l'explosion actuelle de la robotique.
Du côté commercial : du prototype à la production de masse, puis au déploiement dans le monde réel
2025 est également l'année où le chemin de la commercialisation des robots devient pour la première fois clairement visible. Des entreprises de premier plan telles qu'Apptronik, Figure et Tesla Optimus annoncent successivement des plans de production de masse, marquant le passage des robots humanoïdes du prototype à la phase industrielle réplicable. Parallèlement, de nombreuses entreprises commencent à déployer des pilotes dans des secteurs à forte demande comme la logistique d'entrepôt et l'automatisation des usines, testant l'efficacité et la fiabilité des robots dans des environnements réels.
Avec l'amélioration des capacités de production de masse, le modèle "Operation-as-a-Service (OaaS)" commence à être validé par le marché. Les entreprises n'ont plus besoin de supporter un coût d'achat élevé d'un coup, mais peuvent souscrire à des services robotiques mensuels, améliorant ainsi considérablement la structure du ROI. Ce modèle devient une innovation commerciale clé pour l'adoption à grande échelle des robots.
De plus, l'industrie comble rapidement les lacunes de son système de services, notamment les réseaux de maintenance, la fourniture de pièces détachées, la surveillance à distance et les plateformes d'exploitation. Avec la maturation de ces capacités, les robots disposent des conditions complètes nécessaires pour fonctionner en continu et boucler la boucle commerciale.
Dans l'ensemble, 2025 marque le passage de la robotique de "peut-on le faire" à "peut-on le vendre, l'utiliser, l'utiliser à un coût abordable", avec l'apparition d'un cycle vertueux et durable pour la première fois.
Web3 X Écosystème robotique
Avec l'explosion de l'industrie robotique en 2025, la technologie blockchain trouve également sa place, complétant le système robotique par plusieurs capacités clés. Sa valeur principale peut être résumée en trois axes : i.) la collecte de données pour la technologie robotique, ii.) le réseau de coordination inter-appareils, et iii.) le réseau économique permettant aux machines de participer de manière autonome au marché.
Décentralisation + mécanismes d'incitation par jetons : une nouvelle source de données pour l'entraînement des robots, mais la qualité des données dépend de l'amélioration du Data Engine back-end
Le principal goulot d'étranglement pour l'entraînement des modèles Physical-AI réside dans l'échelle des données du monde réel, la couverture des scénarios et la rareté des données d'interaction physique de haute qualité. L'émergence de DePIN/DePAI permet à Web3 d'apporter de nouvelles solutions à la question "qui contribue aux données et comment assurer une contribution continue".
Cependant, selon la recherche académique, les données décentralisées, bien qu'elles aient un potentiel en termes d'échelle et de couverture, ne sont pas intrinsèquement synonymes de données d'entraînement de haute qualité ; un data engine back-end est encore nécessaire pour filtrer, nettoyer et contrôler les biais avant de pouvoir les utiliser pour l'entraînement de grands modèles.
Tout d'abord, Web3 résout le problème de la "motivation à fournir des données", mais ne garantit pas directement la "qualité des données".
Traditionnellement, les données d'entraînement des robots proviennent principalement de laboratoires, de petites flottes ou de collectes internes en entreprise, avec une échelle largement insuffisante.
Le modèle DePIN/DePAI de Web3, grâce à l'incitation par jetons, permet aux utilisateurs ordinaires, aux opérateurs d'équipements ou aux téléopérateurs de devenir des contributeurs de données, augmentant considérablement la diversité et l'échelle des sources de données.
Parmi les projets :
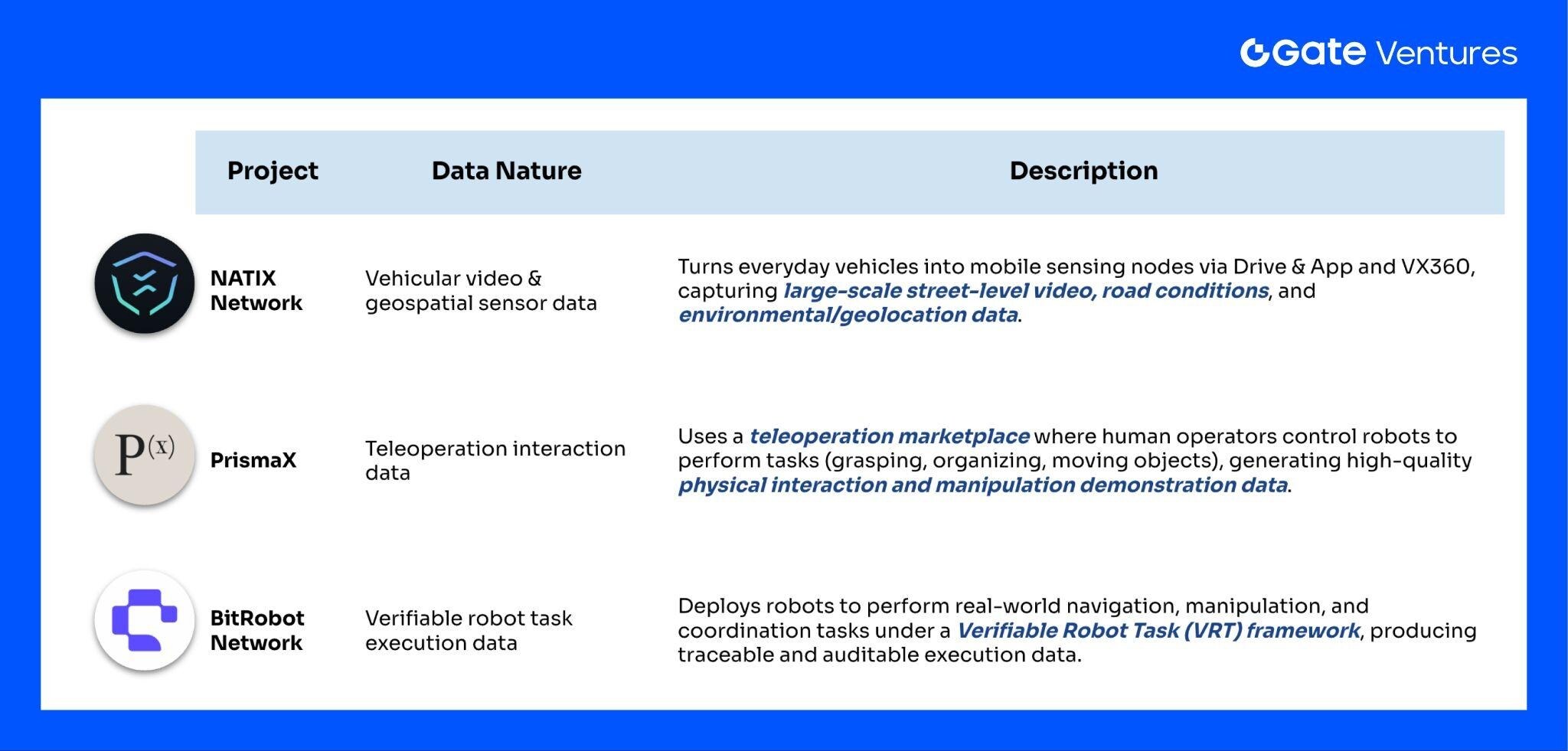
Source: Gate Ventures
● NATIX Network : transforme les véhicules grand public en nœuds de collecte de données mobiles via Drive& App et VX360, collectant des données vidéo, géographiques et environnementales.
● PrismaX : collecte des données d'interaction physique robotique de haute qualité (saisir, organiser, déplacer des objets) via un marché de téléopération.
● BitRobot Network : permet aux nœuds robotiques d'exécuter des tâches vérifiables (VRT), générant des données sur les comportements réels d'opération, de navigation et de collaboration.
Ces projets démontrent que Web3 peut efficacement élargir l'offre de données, couvrant des scénarios réels et des cas de longue traîne difficiles à atteindre pour les systèmes traditionnels.
Mais selon la recherche académique, les données crowdsourcées/décentralisées présentent généralement des problèmes structurels de "manque de précision, bruit élevé, biais importants". De nombreuses études sur le crowdsourcing et le mobile crowdsensing soulignent :
1. Grande variabilité de la qualité des données, bruit et différences de format significatifs
Les différences d'équipement, de méthode d'opération et de compréhension entre contributeurs génèrent beaucoup de données incohérentes, nécessitant détection et filtrage.
2. Les biais structurels sont omniprésents
Les participants sont souvent concentrés dans certaines zones/groupes, ce qui entraîne une distribution d'échantillonnage non représentative du monde réel.
3. Les données crowdsourcées brutes ne peuvent pas être utilisées directement pour l'entraînement des modèles
La recherche sur la conduite autonome, l'AI incarnée et la robotique souligne l'importance d'un processus complet : collecte → contrôle qualité → alignement redondant → augmentation des données → complétion des cas de longue traîne → correction de la cohérence des labels, et non "collecter pour utiliser". (7)
Ainsi, le réseau de données Web3 offre une source de données plus vaste, mais "la possibilité de les utiliser directement pour l'entraînement" dépend de l'ingénierie des données back-end.
La véritable valeur de DePIN est de fournir à la Physical AI une base de données "continue, évolutive et moins coûteuse"
Plutôt que de dire que Web3 résout immédiatement le problème de la précision des données, il résout plutôt :
● "Qui est prêt à contribuer des données sur le long terme ?"
● "Comment encourager davantage d'appareils réels à se connecter ?"
● "Comment passer d'un modèle de collecte de données centralisé à un réseau ouvert et durable ?"
En d'autres termes, DePIN/DePAI fournit la base pour l'échelle et la couverture des données, faisant de Web3 une pièce essentielle de la "couche source de données" à l'ère de la Physical AI, mais pas le seul garant de la qualité des données.
Réseau de coordination inter-appareils : un OS universel pour la communication robotique
L'industrie robotique évolue actuellement de l'intelligence individuelle vers la collaboration collective, mais un goulot d'étranglement persiste : les robots de marques, formes et stacks technologiques différents ne peuvent pas partager d'informations, ni interopérer, et manquent d'un média de communication unifié. Ainsi, la collaboration multi-robots dépend de systèmes fermés construits par les fabricants, limitant fortement le déploiement à grande échelle.
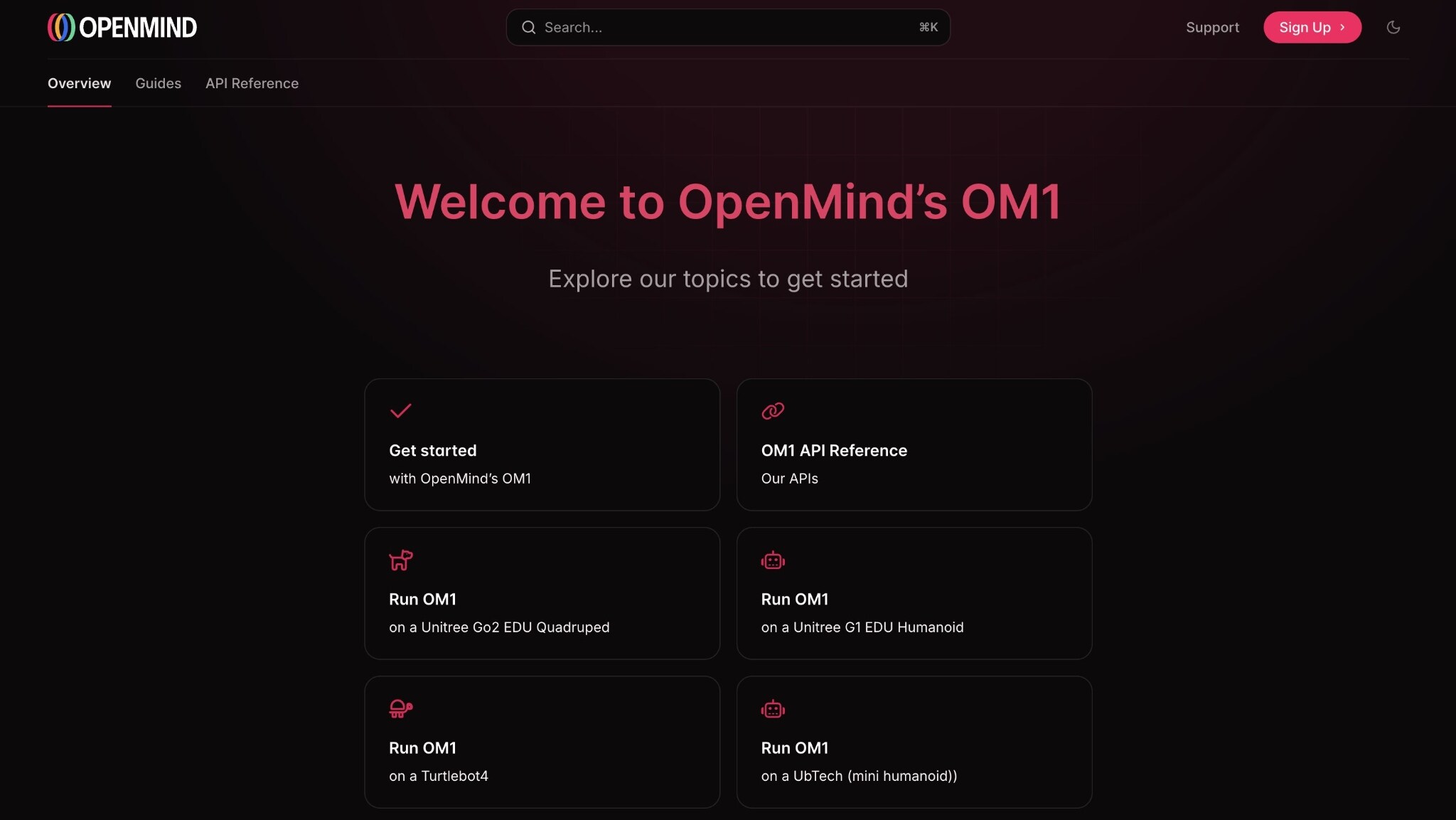
Les couches d'OS robotique universel (Robot OS Layer) apparues récemment, représentées par OpenMind, offrent une nouvelle solution à ce problème. Ces systèmes ne sont pas de simples "logiciels de contrôle", mais des systèmes d'exploitation intelligents inter-appareils, fournissant un langage commun et une infrastructure publique pour la communication, la cognition, la compréhension et la collaboration entre robots, à l'image d'Android pour l'industrie du smartphone.(8)
Dans l'architecture traditionnelle, les capteurs, contrôleurs et modules de raisonnement internes à chaque robot sont isolés, et il est impossible de partager des informations sémantiques entre appareils. La couche d'OS universel, en unifiant les interfaces de perception, les formats de décision et les méthodes de planification des tâches, permet aux robots de disposer pour la première fois de :
● Des descriptions abstraites de l'environnement extérieur (vision / son / tactile → événements sémantiques structurés)
● Une compréhension unifiée des instructions (langage naturel → planification d'action)
● Une expression multimodale d'état partageable
Cela revient à doter les robots d'une couche cognitive capable de comprendre, d'exprimer et d'apprendre.
Les robots ne sont donc plus de simples "actionneurs isolés", mais disposent d'une interface sémantique unifiée, pouvant être intégrés à des réseaux de collaboration à grande échelle.
Par ailleurs, la plus grande avancée de l'OS universel réside dans la "compatibilité inter-appareils" : pour la première fois, des robots de marques et formes différentes peuvent "parler le même langage". Tous les robots peuvent se connecter à un bus de données et une interface de contrôle unifiés via le même OS.
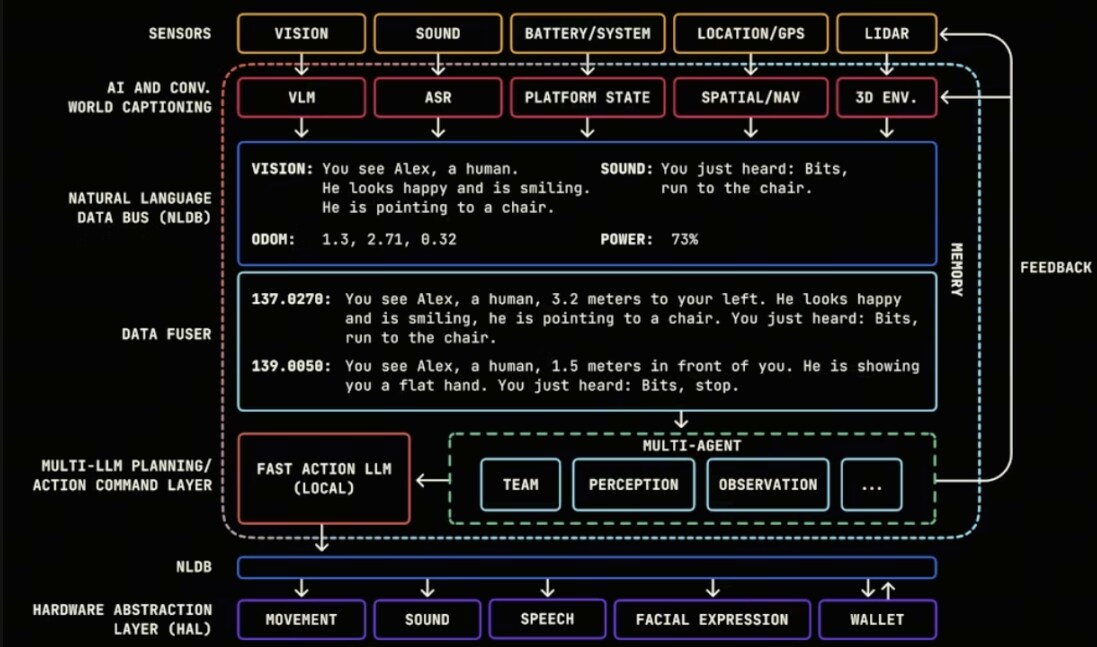
Source: Openmind
Cette capacité d'interopérabilité inter-marques permet à l'industrie d'envisager pour la première fois :
● La collaboration multi-robots
● L'enchère et la planification des tâches
● Le partage de la perception / des cartes
● L'exécution conjointe de tâches à travers différents espaces
La collaboration nécessite une "compréhension du même format d'information", et l'OS universel résout ce problème de langage fondamental.
Dans le système de collaboration inter-appareils, peaq représente une autre direction d'infrastructure clé : une couche de protocole fournissant aux machines une identité vérifiable, des incitations économiques et des capacités de coordination au niveau du réseau.(9)
Il ne s'agit pas de savoir "comment les robots comprennent le monde", mais "comment les robots participent à la collaboration en tant qu'individus dans le réseau".
Ses principales caractéristiques incluent :
1. Identité machine
peaq permet l'enregistrement d'identités décentralisées pour les robots, appareils et capteurs, leur permettant de :
● Se connecter en tant qu'individus à n'importe quel réseau
● Participer à la répartition des tâches et aux systèmes de réputation de manière fiable
C'est la condition préalable pour que les machines deviennent des "nœuds du réseau".
2. Comptes économiques autonomes
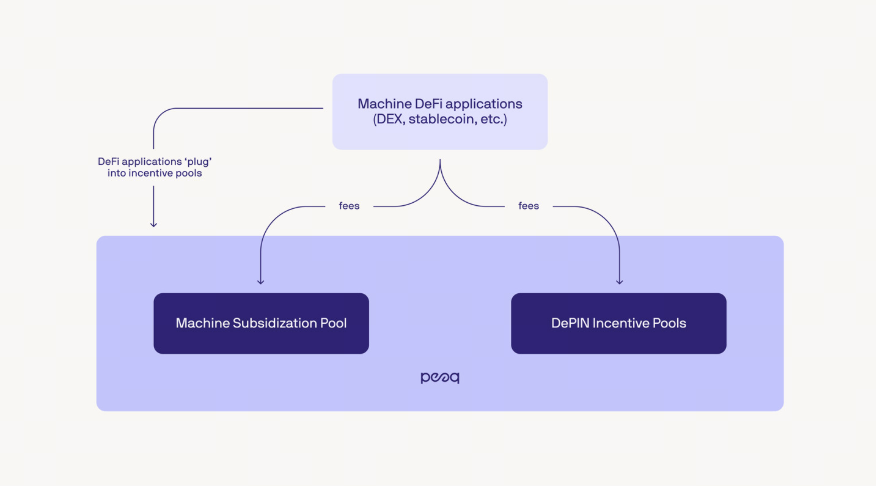
Source: Peaq
Les robots acquièrent une autonomie économique. Grâce au support natif des paiements en stablecoins et à une logique de facturation automatique, les robots peuvent effectuer des rapprochements et des paiements sans intervention humaine, y compris :
● Règlement des données de capteurs à l'usage
● Paiement à l'appel pour la puissance de calcul et l'inférence de modèles
● Règlement instantané des services entre robots (transport, livraison, inspection)
● Appels autonomes à des infrastructures telles que la recharge ou la location d'espace
De plus, les robots peuvent utiliser des paiements conditionnels :
● Tâche accomplie → paiement automatique
● Résultat non conforme → fonds automatiquement gelés ou remboursés
Cela rend la collaboration robotique fiable, auditable et arbitrable automatiquement, une capacité clé pour le déploiement commercial à grande échelle.
En outre, les revenus générés par les services et ressources fournis par les robots dans le monde réel peuvent être tokenisés et reflétés on-chain, rendant leur valeur et leur flux de trésorerie transparents, traçables, négociables et programmables, construisant ainsi une représentation d'actifs centrée sur la machine.
Avec la maturité de l'IA et des systèmes on-chain, l'objectif est de permettre aux machines de gagner, payer, emprunter et investir de manière autonome, de réaliser des transactions M2M et de former des réseaux économiques auto-organisés, avec coordination et gouvernance sous forme de DAO.
3. Coordination des tâches multi-appareils
À un niveau supérieur, peaq fournit un cadre de coordination entre machines, leur permettant de :
● Partager l'état et la disponibilité
● Participer à l'enchère et à l'appariement des tâches
● Gérer les ressources (puissance de calcul, mobilité, capacité de perception)
Les robots peuvent ainsi collaborer comme des nœuds de réseau, plutôt que de fonctionner isolément. Une fois le langage et les interfaces unifiés, les robots peuvent véritablement rejoindre un réseau de collaboration, au lieu de rester dans des écosystèmes fermés.
Des OS intelligents inter-appareils comme OpenMind tentent de standardiser la façon dont les robots "comprennent le monde et les instructions" ; tandis que des réseaux de coordination Web3 comme Peaq explorent comment permettre à différents appareils d'acquérir une capacité de collaboration organisationnelle vérifiable dans un réseau plus vaste. Ce ne sont que des exemples parmi d'autres, reflétant l'évolution accélérée de l'industrie vers une couche de communication unifiée et un système d'interopérabilité ouvert.
Réseau économique des machines pour la participation autonome au marché
Si l'OS inter-appareils résout le "comment communiquer" des robots, et le réseau de coordination le "comment collaborer", alors l'essence du réseau économique des machines est de transformer la productivité robotique en flux de capital durable, permettant aux robots de financer leur propre fonctionnement et de boucler la boucle.
Un élément clé longtemps manquant dans l'industrie robotique était la "capacité économique autonome". Les robots traditionnels ne pouvaient qu'exécuter des instructions prédéfinies, sans pouvoir gérer des ressources externes, fixer le prix de leurs services ou régler des coûts de manière indépendante. Dès qu'ils entraient dans des scénarios complexes, ils devaient s'en remettre à la comptabilité, à l'approbation et à la planification humaines en back-end, ce qui nuisait gravement à l'efficacité de la collaboration et compliquait le déploiement à grande échelle.
x402 : doter les robots du "statut d'acteur économique"
Source: X@CPPP2443_
x402, en tant que nouvelle norme de paiement agentique, comble cette lacune fondamentale. Les robots peuvent initier des demandes de paiement via la couche HTTP et effectuer des règlements atomiques avec des stablecoins programmables comme USDC. Cela signifie que les robots peuvent non seulement accomplir des tâches, mais aussi acheter de manière autonome toutes les ressources nécessaires à leur exécution :
● Appels de puissance de calcul (inférence LLM / inférence de modèle de contrôle)
● Accès à des environnements ou location d'équipements
● Services d'autres robots
Pour la première fois, les robots peuvent consommer et produire de manière autonome comme de véritables acteurs économiques.
Ces dernières années, des collaborations représentatives entre fabricants de robots et infrastructures crypto montrent que le réseau économique des machines passe du concept à la réalité.
OpenMind × Circle : permettre aux robots de supporter nativement les paiements en stablecoins

Source: Openmind
OpenMind a intégré son OS robotique inter-appareils avec l'USDC de Circle, permettant aux robots d'effectuer des paiements et des règlements en stablecoins directement dans la chaîne d'exécution des tâches.
Cela représente deux avancées majeures :
1. La chaîne d'exécution des tâches robotiques peut intégrer nativement le règlement financier, sans dépendre du système back-end
2. Les robots peuvent effectuer des "paiements sans frontières" dans des environnements multiplateformes et multimarques
Pour la collaboration robotique, c'est une capacité fondamentale vers des entités économiques autonomes.
Kite AI : construire une blockchain agent-native pour l'économie des machines
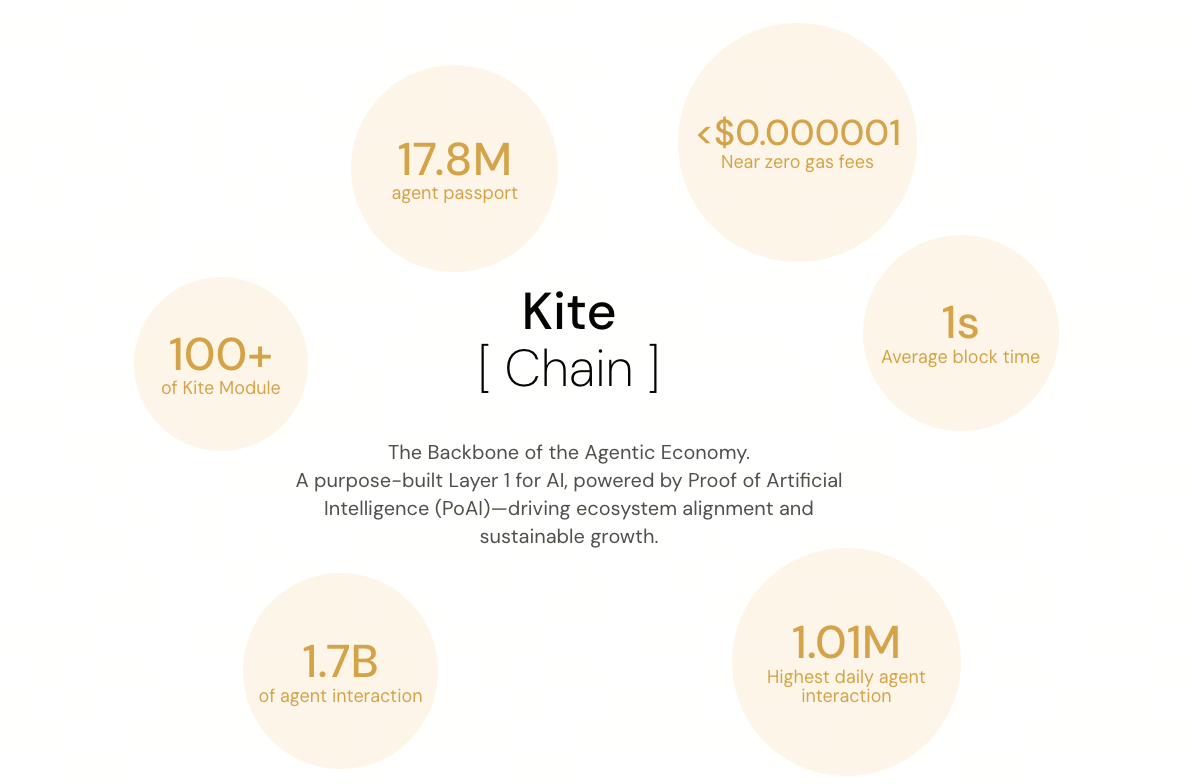
Source: Kite AI
Kite AI va encore plus loin dans la structuration de l'économie des machines : elle conçoit pour les AI agents une identité on-chain, des portefeuilles composables, un système de paiement et de règlement automatisé, permettant aux agents d'exécuter de manière autonome diverses transactions on-chain.(10)
Elle fournit un "environnement économique autonome pour agents", parfaitement adapté à la participation autonome des robots au marché.
1. Couche d'identité Agent / Machine (Kite Passport) : chaque AI Agent (pouvant à l'avenir être associé à un robot physique) reçoit une identité cryptographique et un système de clés à plusieurs niveaux, permettant de contrôler précisément "qui dépense" et "au nom de qui", avec révocation et traçabilité à tout moment, condition préalable pour considérer l'Agent comme un acteur économique indépendant.
2. Stablecoin natif + primitives x402 intégrées : Kite intègre la norme de paiement x402 au niveau de la blockchain, utilisant l'USDC et autres stablecoins comme actifs de règlement par défaut, permettant aux agents d'autoriser, d'envoyer, de recevoir et de rapprocher des paiements via des intents standardisés, optimisé pour les paiements machine-to-machine fréquents et de faible montant (confirmation sub-seconde, faibles frais, auditabilité).
3. Contraintes et gouvernance programmables : via des stratégies on-chain, il est possible de fixer des plafonds de dépenses, des listes blanches de commerçants/contrats, des règles de gestion des risques et des pistes d'audit pour les agents, trouvant un équilibre entre sécurité et autonomie pour "ouvrir un portefeuille aux machines".
En d'autres termes, si l'OS d'OpenMind permet aux robots de "comprendre le monde et de collaborer", l'infrastructure blockchain de Kite AI permet aux robots de "survivre dans un système économique".
Grâce à ces technologies, le réseau économique des machines construit une "incitation à la collaboration" et une "boucle de valeur", permettant non seulement aux robots de "payer", mais surtout de :
● Gagner des revenus selon la performance (règlement basé sur les résultats)
● Acheter des ressources à la demande (structure de coûts autonome)
● Participer à la concurrence du marché avec une réputation on-chain (exécution vérifiable)
Cela signifie que, pour la première fois, les robots peuvent participer à un système complet d'incitation économique : travailler → gagner de l'argent → dépenser → optimiser leur comportement de manière indépendante.
Conclusion
Perspectives
En résumé, le rôle de Web3 dans l'industrie robotique devient progressivement clair :
● Couche de données : fournit une motivation à la collecte de données à grande échelle et multi-sources, améliorant la couverture des scénarios de longue traîne ;
● Couche de collaboration : introduit une identité unifiée, l'interopérabilité et des mécanismes de gouvernance des tâches pour la collaboration inter-appareils ;
● Couche économique : grâce aux paiements on-chain et au règlement vérifiable, offre aux robots un cadre d'action économique programmable.
Ces capacités posent ensemble les bases d'un futur Internet des machines, permettant aux robots de collaborer et d'opérer dans un environnement technologique plus ouvert et auditable.
Incertitudes
Bien que l'écosystème robotique connaisse une percée sans précédent en 2025, la transition du "techniquement faisable" au "déploiement à grande échelle et durable" reste semée d'incertitudes. Celles-ci ne proviennent pas d'un simple goulot d'étranglement technologique, mais d'un couplage complexe entre ingénierie, économie, marché et institutions.
La viabilité économique est-elle réellement établie ?
Malgré les avancées en perception, contrôle et intelligence, le déploiement à grande échelle des robots dépendra en fin de compte de la demande commerciale réelle et de la rentabilité économique. La plupart des robots humanoïdes et généralistes en sont encore au stade pilote ou de validation, et il manque encore des données à long terme pour savoir si les entreprises paieront durablement pour des services robotiques et si les modèles OaaS/RaaS peuvent garantir un ROI stable dans différents secteurs.
Par ailleurs, l'avantage coût-efficacité des robots dans des environnements complexes et non structurés n'est pas encore pleinement établi. Dans de nombreux cas, l'automatisation traditionnelle ou les solutions humaines restent moins chères et plus fiables. Cela signifie que la faisabilité technique ne se traduit pas automatiquement par une nécessité économique, et que l'incertitude du rythme de commercialisation influencera directement la vitesse d'expansion du secteur.
Défis systémiques de fiabilité technique et de complexité opérationnelle
Le plus grand défi concret de l'industrie robotique n'est souvent pas "peut-on accomplir la tâche", mais "peut-on fonctionner longtemps, de manière stable et à faible coût". Lors du déploiement à grande échelle, les taux de panne matérielle, les coûts de maintenance, les mises à jour logicielles, la gestion de la consommation énergétique ainsi que les questions de sécurité et de responsabilité deviennent rapidement des risques systémiques.
Même si le modèle OaaS réduit les dépenses initiales, les coûts cachés liés à l'exploitation, à l'assurance, à la responsabilité et à la conformité peuvent encore éroder le modèle commercial global. Si la fiabilité ne franchit pas le seuil minimal requis pour les scénarios commerciaux, les réseaux robotiques et l'économie des machines auront du mal à se concrétiser.
Coordination de l'écosystème, convergence des standards et adaptation institutionnelle
L'écosystème robotique évolue rapidement au niveau des OS, des frameworks d'Agent, des protocoles blockchain et des standards de paiement, mais il reste aujourd'hui très fragmenté. Les coûts de collaboration inter-appareils, inter-fabricants et inter-systèmes sont élevés, les standards universels ne sont pas encore pleinement convergents, ce qui peut entraîner une fragmentation de l'écosystème, des redondances et des pertes d'efficacité.
Parallèlement, les robots dotés de capacités de décision et d'action économique autonomes remettent en question les cadres réglementaires et juridiques existants : la responsabilité, la conformité des paiements, les frontières des données et de la sécurité restent floues. Si les institutions et les standards ne suivent pas le rythme de l'évolution technologique, le réseau économique des machines fera face à des incertitudes en matière de conformité et de déploiement.
Dans l'ensemble, les conditions pour l'adoption à grande échelle des robots se mettent progressivement en place, et l'ébauche d'un système économique des machines se dessine dans la pratique industrielle. Web3 × Robotics en est encore à ses débuts, mais montre déjà un potentiel de développement à long terme digne d'attention.
Articles de référence
Avertissement : le contenu de cet article reflète uniquement le point de vue de l'auteur et ne représente en aucun cas la plateforme. Cet article n'est pas destiné à servir de référence pour prendre des décisions d'investissement.
Vous pourriez également aimer
Analyse de la hausse de 18 % de Canton : l’objectif de 0,135 $ pour CC est-il en vue ?
L'impact dynamique de USDT suscite une attention accrue sur le gel des stablecoins
XRP reste solide alors que la demande institutionnelle explose