
Становлення машинної економіки: як Web3 сприяє переходу роботів від інструментів до автономних систем

Вступ
Останніми роками індустрія робототехніки переживає подвійний переломний момент у технологічному та комерційному аспектах. У минулому роботи здебільшого розглядалися як "інструменти", які залежать від корпоративного бекенду, не здатні до самостійної координації і не мають економічної поведінки. Але з інтеграцією таких нових технологій, як AI Agent, on-chain платежі (x402), Machine Economy, екосистема роботів еволюціонує від одновимірної конкуренції апаратного забезпечення до багаторівневої складної системи, що складається з "тіла — інтелекту — платежів — організації".
Ще більш важливо, що глобальні ринки капіталу також швидко оцінюють цю тенденцію. JPMorgan прогнозує, що до 2050 року ринок гуманоїдних роботів може досягти 5 трильйонів доларів і надалі стимулювати зростання суміжних галузей, таких як ланцюги постачання, експлуатація, обслуговування тощо. У тому ж році кількість гуманоїдних роботів, що використовуються, може перевищити 1 мільярд. Це означає, що роботи перейдуть від промислового обладнання до справжніх "масових учасників суспільства".(1)
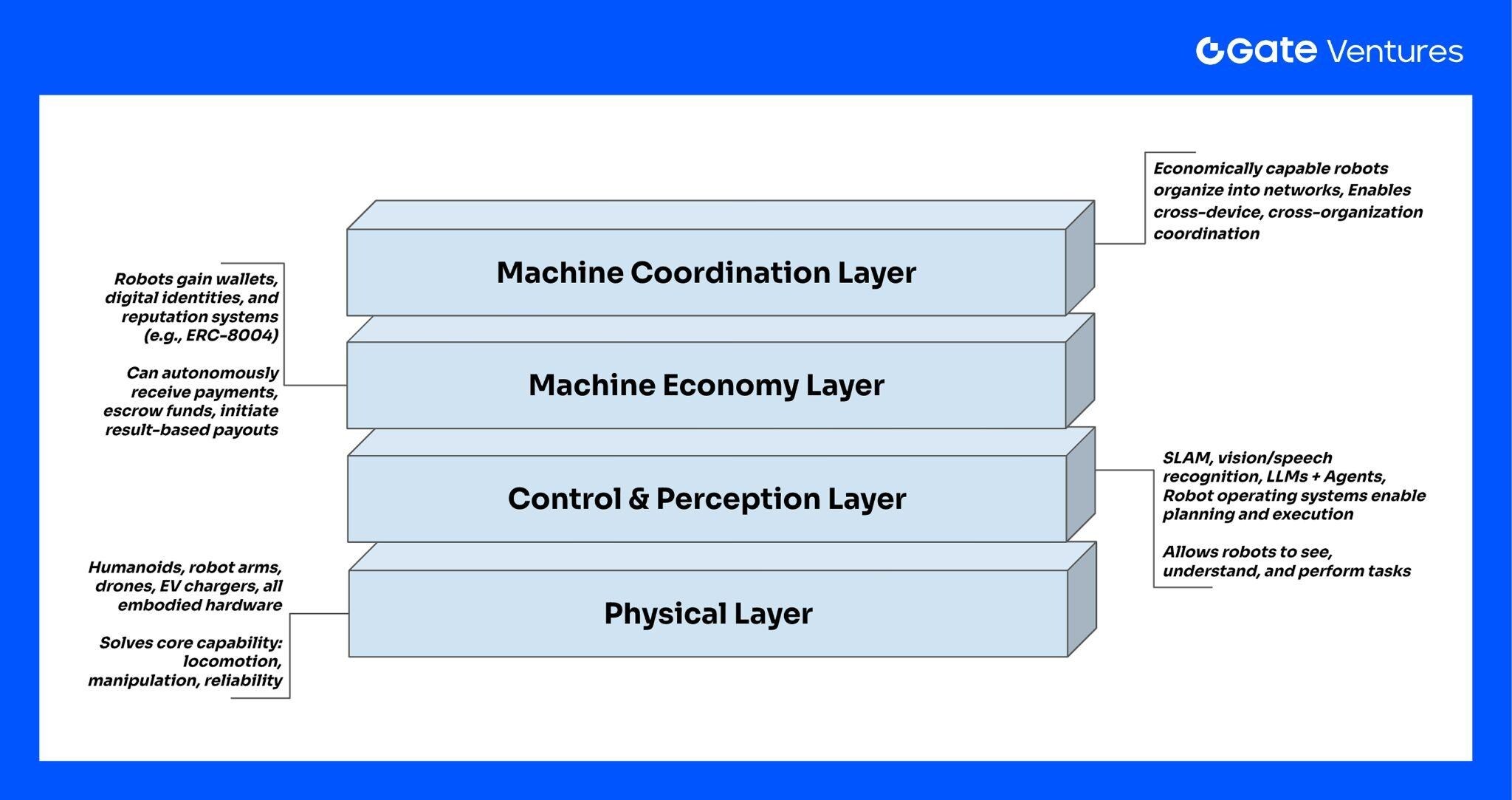
Щоб зрозуміти майбутній напрямок розвитку індустрії робототехніки, ми можемо розділити всю екосистему на чотири чіткі рівневі структури:
Source: Gate Ventures
Перший рівень — фізична основа (Physical Layer): включає гуманоїдів, роботизовані руки, дрони, EV-зарядні станції та всі інші втілені носії. Вони вирішують базові питання руху та виконання завдань, наприклад, ходьба, захоплення, механічна надійність і вартість. Однак машини цього рівня все ще "не мають економічної поведінки", тобто не можуть самостійно здійснювати оплату, платежі чи закупівлю послуг.
Другий рівень — рівень контролю та сприйняття (Control & Perception Layer): охоплює традиційну робототехнічну кібернетику, SLAM, системи сприйняття, розпізнавання мови та зору, а нині — LLM+Agent, а також дедалі більше роботизованих операційних систем із абстрактним плануванням (наприклад, ROS, OpenMind OS). Цей рівень дозволяє машинам "розуміти, бачити, виконувати завдання", але економічна діяльність, така як платежі, контракти, ідентифікація, все ще повинна оброблятися людиною у бекенді.
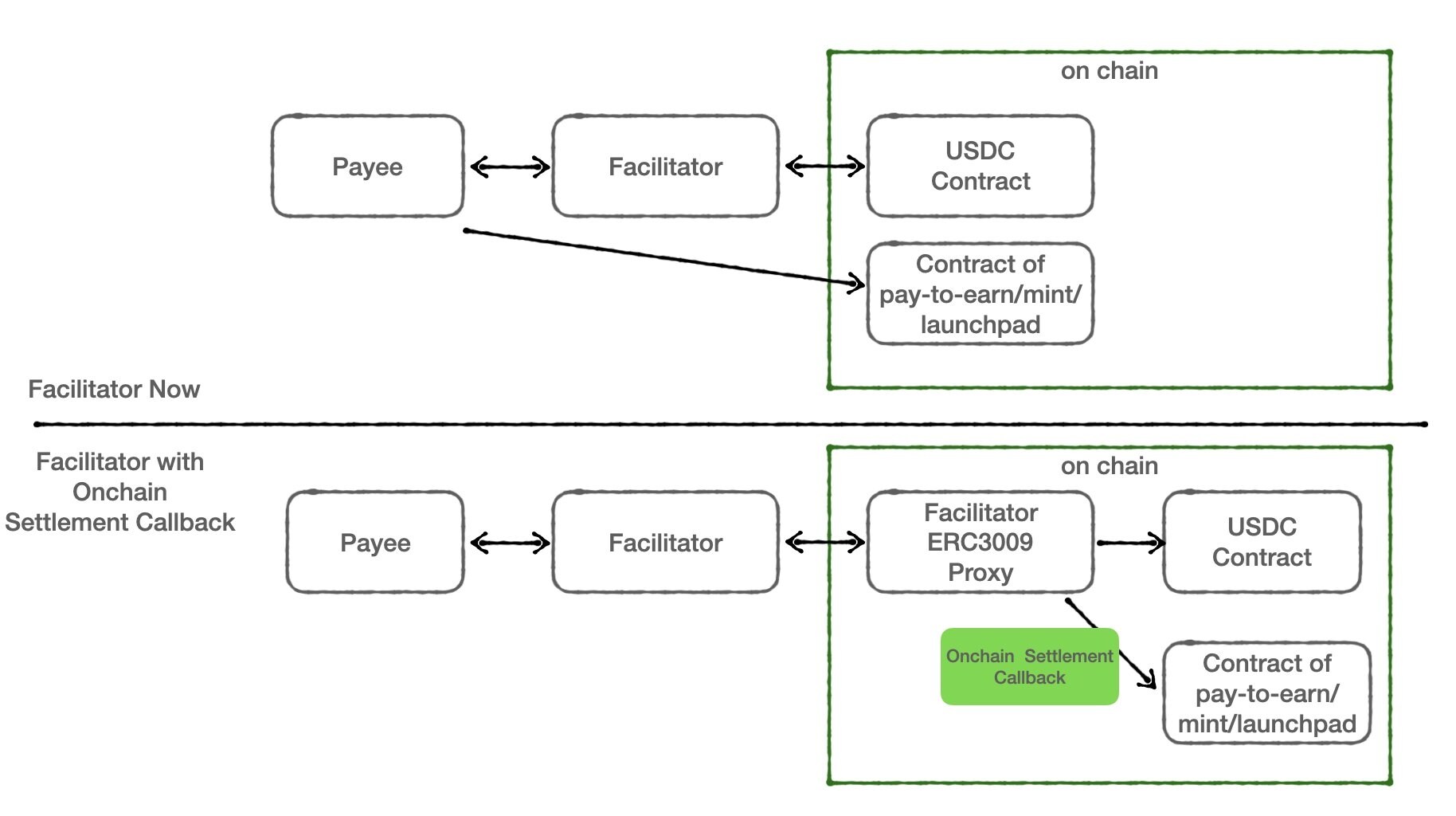
Третій рівень — рівень економічних розрахунків (Machine Economy Layer): справжня трансформація починається тут. Машини отримують гаманці, цифрову ідентичність, систему репутації (наприклад, ERC-8004), і через x402, on-chain розрахунки, Onchain Callback тощо безпосередньо оплачують обчислення, дані, енергію, дорожні права; водночас вони можуть самостійно отримувати оплату за виконання завдань, управляти коштами, ініціювати оплату за результатом (result-based pay). На цьому рівні роботи переходять від "корпоративного активу" до "економічного суб'єкта" з можливістю участі на ринку.
Четвертий рівень — рівень координації та управління (Machine Coordination Layer): коли багато роботів мають автономні платежі та ідентичність, вони можуть організовуватися у флотилії та мережі — дронові рої, мережі прибиральних роботів, EV-енергомережі тощо. Вони можуть автоматично змінювати ціни, планувати розклад, брати участь у торгах на завдання, ділитися прибутком, а навіть створювати автономні економічні організми у формі DAO.
Завдяки цій чотиришаровій структурі ми бачимо:
Майбутня екосистема роботів — це вже не просто революція апаратного забезпечення, а системна трансформація "фізики + інтелекту + фінансів + організації".
Це не лише переосмислює межі можливостей машин, а й змінює способи захоплення цінності. Як робототехнічні компанії, так і AI-розробники, постачальники інфраструктури, а також крипто-нативні платіжні та ідентифікаційні протоколи знайдуть своє місце в новій економічній системі роботів.
Чому індустрія робототехніки вибухає саме зараз?
Останні десятиліття індустрія робототехніки залишалася в лабораторіях, на виставках та у специфічних промислових сценаріях, завжди на крок від справжнього масштабного комерційного та соціального впровадження. Однак після 2025 року цей крок починає долатися. Як з точки зору ринку капіталу, так і зрілості технологій, а також за оцінками галузевих спостерігачів, таких як CEO Nvidia Jensen Huang, надходить один і той самий сигнал:
“The ChatGPT moment for general robotics is just around the corner”
Ця оцінка не є перебільшенням, а базується на трьох ключових індустріальних сигналах:
1. Потужності, моделі, симуляція, сприйняття та контроль досягли зрілості одночасно
2. Інтелект роботів переходить від закритого контролю до відкритого прийняття рішень, керованого LLM/Agent
3. Стрибок від одиничних можливостей до системних: роботи стають не лише "активними", а й "здатними до співпраці, розуміння, економічної діяльності"
Jensen Huang навіть прогнозує, що гуманоїдні роботи стануть широко комерційними протягом наступних 5 років, і ця точка зору повністю узгоджується з поведінкою ринку капіталу та впровадженням у 2025 році.
Капітальний аспект: величезні інвестиції доводять, що "точка перелому" вже оцінена ринком
У 2024–2025 роках індустрія робототехніки переживає безпрецедентну щільність та масштаб фінансування, лише у 2025 році відбулося кілька угод на понад 500 мільйонів доларів, зокрема:
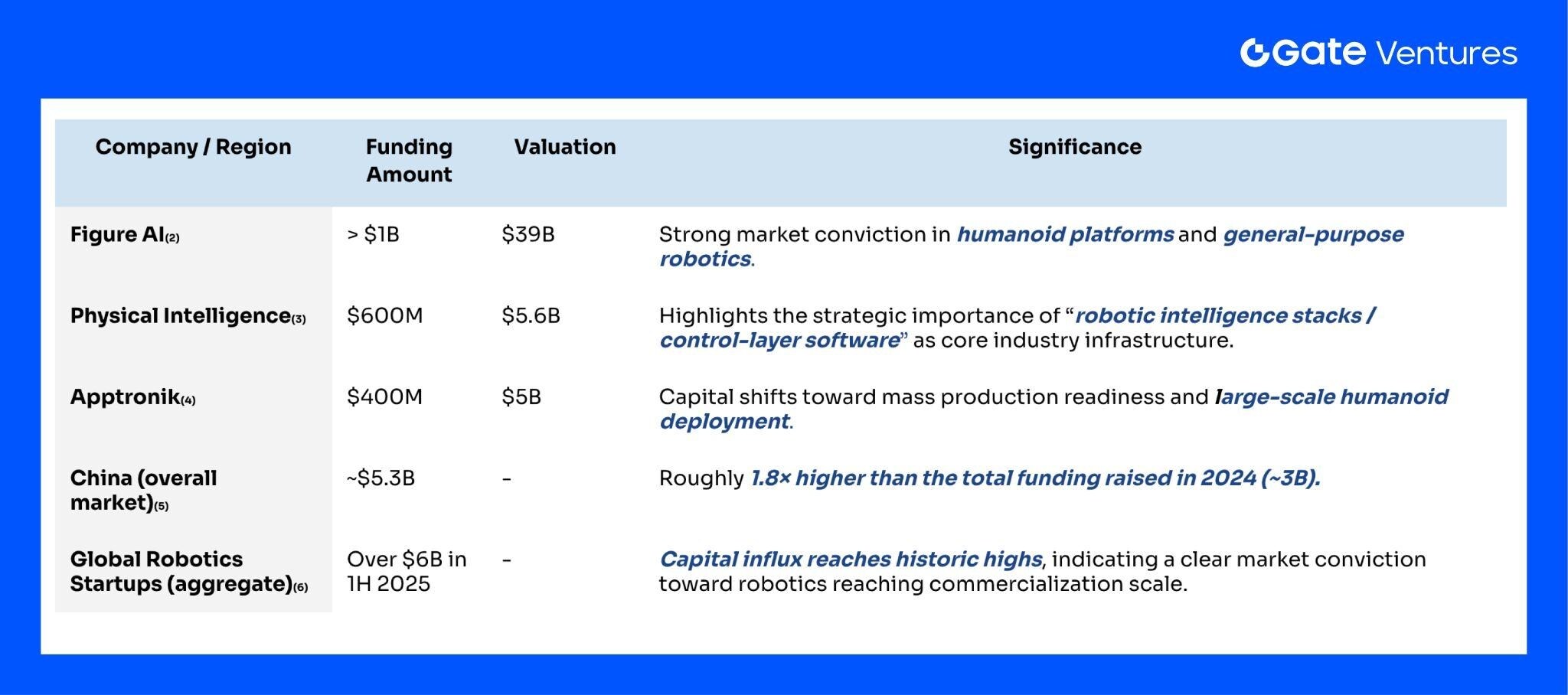
Source: Gate Ventures
Капітал чітко дає зрозуміти: індустрія робототехніки вже досягла стадії перевірених інвестицій.
Спільні риси цих інвестицій:
● Це не "концептуальні інвестиції", а у виробничі лінії, ланцюги постачання, загальний інтелект, комерційне впровадження
● Це не розрізнені проекти, а поєднання програмного та апаратного забезпечення, повний стек, сервісна система повного життєвого циклу роботів
Капітал не робить безпідставних ставок на мільярди — за цим стоїть підтвердження зрілості галузі.
Технологічний аспект: вирішальні прориви відбуваються одночасно
У 2025 році індустрія робототехніки переживає історично рідкісну "конвергенцію багатьох технологій". По-перше, прориви AI Agent і великих мовних моделей дозволили роботам перейти від "машин, що виконують інструкції", до "інтелектуальних агентів, які розуміють мову, розбивають завдання, поєднують зір і дотик для міркувань". Мультимодальне сприйняття та нове покоління моделей управління (наприклад, RT-X, Diffusion Policy) вперше надали роботам базові можливості, близькі до загального інтелекту.
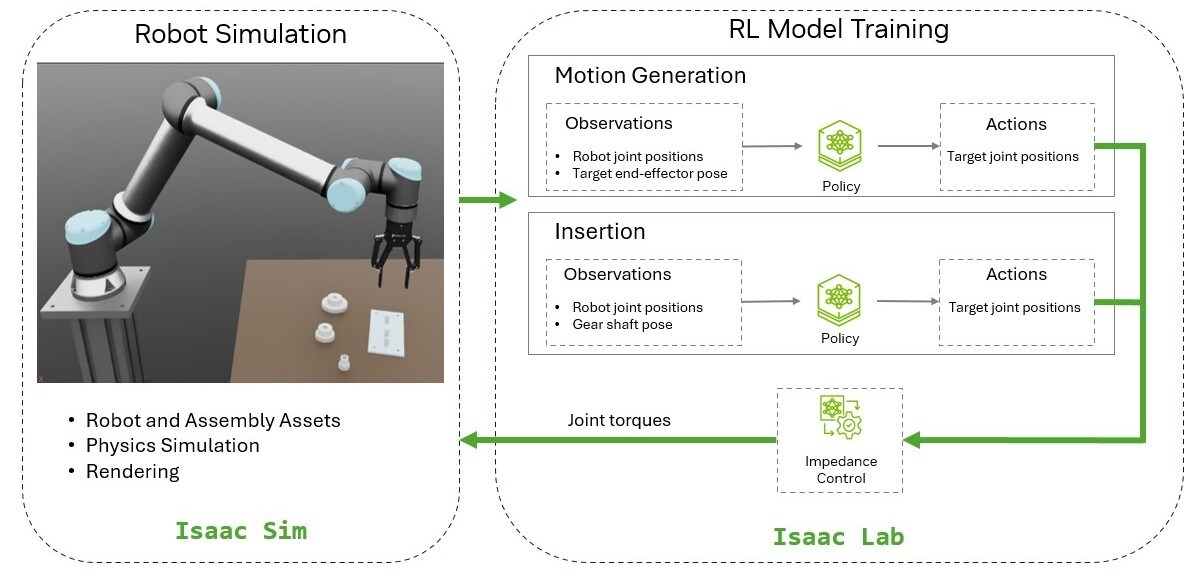
Source: Nvidia
Водночас технології симуляції та переносу швидко дозрівають. Високоточні симуляційні середовища, такі як Isaac, Rosie, значно скорочують розрив між симуляцією та реальністю, дозволяючи роботам проходити масштабне тренування у віртуальному середовищі з мінімальними витратами та надійно переносити навички у реальний світ. Це вирішує основну проблему повільного навчання роботів, дорогого збору даних і високих ризиків у реальному середовищі.
Еволюція апаратного забезпечення також є ключовою. Основні компоненти, такі як мотор-редуктори, суглобові модулі, сенсори, завдяки масштабуванню ланцюгів постачання, постійно дешевшають, а стрімке зростання Китаю у глобальному ланцюгу постачання роботів ще більше підвищує продуктивність галузі. Зі стартом масового виробництва у багатьох компаніях роботи вперше отримали промислову базу для "тиражування та масштабного впровадження".
Нарешті, покращення у надійності та енергоспоживанні дозволяють роботам відповідати мінімальним вимогам для комерційного застосування. Кращий контроль моторів, резервні системи безпеки та операційні системи реального часу дозволяють роботам тривалий час стабільно працювати у корпоративних сценаріях.
Усі ці фактори вперше створили для індустрії робототехніки повні умови для переходу від "лабораторного демо" до "масштабного реального впровадження". Саме це є фундаментальною причиною вибухового зростання галузі зараз.
Комерційний аспект: від прототипу → до масового виробництва → до реального впровадження
2025 рік — це також перший рік, коли шлях комерціалізації роботів стає чітким. Провідні компанії, такі як Apptronik, Figure, Tesla Optimus, одна за одною оголошують плани масового виробництва, що знаменує перехід гуманоїдних роботів від прототипів до тиражованої індустріалізації. Водночас багато компаній починають пілотні впровадження у сферах з високим попитом, таких як складська логістика, автоматизація заводів, перевіряючи ефективність і надійність роботів у реальних умовах.
Зі зростанням можливостей масового виробництва апаратного забезпечення модель "Operation-as-a-Service (OaaS)" починає отримувати ринкове підтвердження. Підприємства більше не повинні одноразово платити великі суми за придбання, а можуть підписуватися на роботизовані послуги щомісяця, що значно покращує структуру ROI. Ця модель стала ключовою комерційною інновацією для масштабного впровадження роботів.
Крім того, галузь швидко доповнює раніше відсутню сервісну інфраструктуру, включаючи мережу ремонту, постачання запчастин, платформи віддаленого моніторингу та обслуговування. З формуванням цих можливостей роботи отримують повний набір умов для безперервної експлуатації та комерційного замикання циклу.
Загалом, 2025 рік — це рік, коли роботи переходять від "чи можна зробити" до "чи можна продати, чи можна використовувати, чи це доступно", і вперше з'являється стійкий позитивний цикл комерціалізації.
Web3 X екосистема роботів
Зі стрімким вибухом індустрії робототехніки у 2025 році блокчейн-технології також знаходять у ній чітке місце, доповнюючи систему роботів кількома ключовими можливостями. Їх основна цінність зводиться до трьох напрямків: i.) збір даних для робототехнічних технологій, ii.) міжпристроєва мережа координації машин, iii.) машинна економічна мережа для підтримки автономної участі машин у ринку.
Децентралізація + токен-інсентиви створюють нові джерела даних для тренування роботів, але якість даних залежить від покращення бекендового Data Engine
Основний вузол тренування Physical-AI моделей — це масштаб, охоплення сценаріїв і дефіцит якісних фізичних інтерактивних даних реального світу. Поява DePIN/DePAI дозволяє Web3 запропонувати нові рішення на рівні "хто надає дані і як це робити постійно".
Однак, згідно з академічними дослідженнями, децентралізовані дані мають потенціал у масштабі та охопленні, але самі по собі не є високоякісними тренувальними даними — потрібна бекендова data engine для відбору, очищення та контролю упереджень, щоб вони стали придатними для тренування великих моделей.
По-перше, Web3 вирішує проблему "мотивації для постачання даних", а не безпосередньо "якості даних".
Традиційні тренувальні дані для роботів надходять переважно з лабораторій, невеликих автопарків або внутрішнього збору компаній, і їх масштаб недостатній.
Модель DePIN/DePAI у Web3 за допомогою токен-інсентивів дозволяє звичайним користувачам, операторам пристроїв або віддаленим операторам стати постачальниками даних, значно збільшуючи масштаб і різноманітність джерел даних.
Проекти включають:
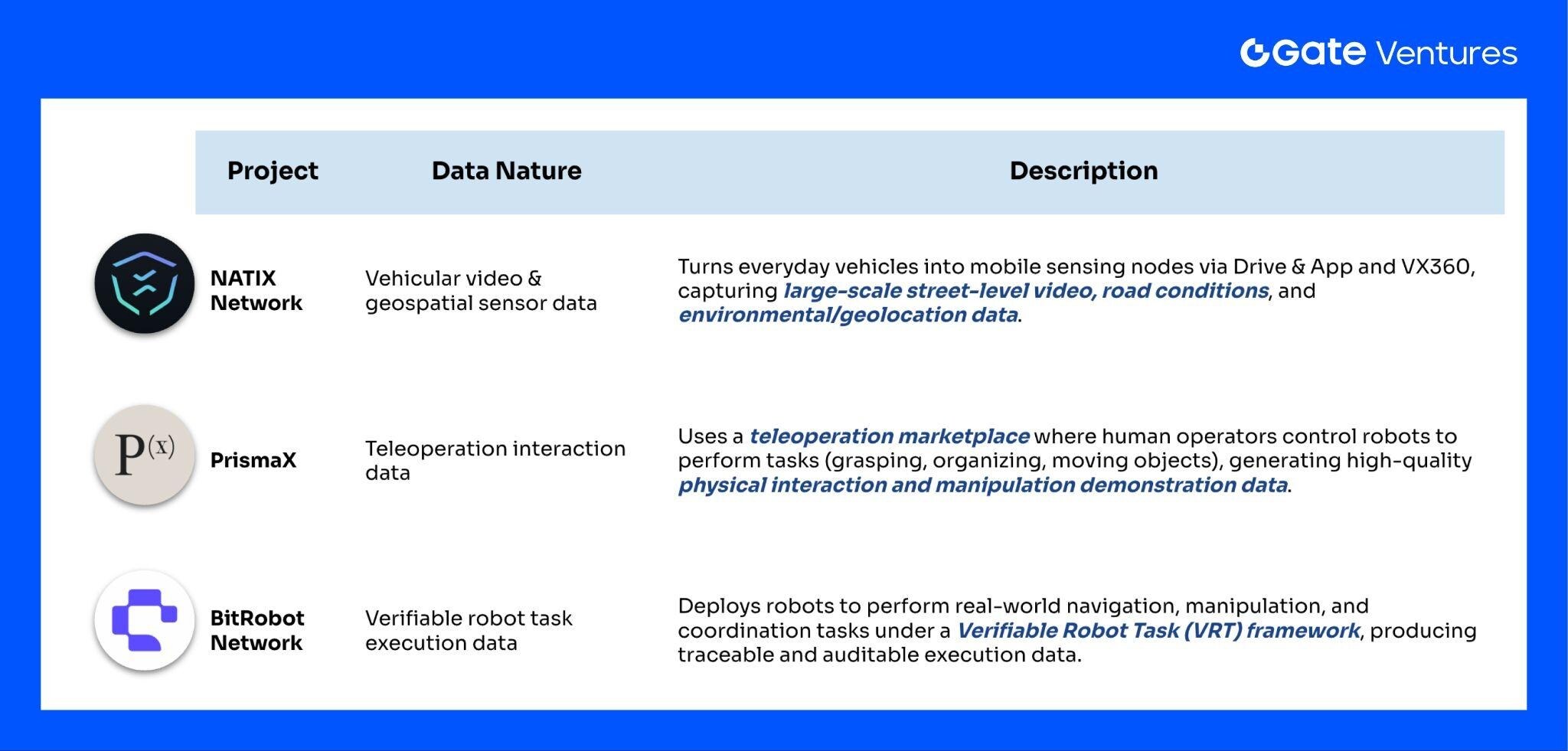
Source: Gate Ventures
● NATIX Network: через Drive& App і VX360 перетворює масові транспортні засоби на мобільні вузли збору даних, збираючи відео, географічні та екологічні дані.
● PrismaX: збирає високоякісні дані фізичної взаємодії роботів (захоплення, сортування, переміщення предметів) через ринок віддаленого керування.
● BitRobot Network: дозволяє роботизованим вузлам виконувати перевірювані завдання (VRT), генеруючи дані реальних операцій, навігації, кооперативної поведінки.
Ці проекти демонструють, що Web3 може ефективно розширити пропозицію даних, доповнюючи традиційні системи у покритті реальних сценаріїв і довгого хвоста.
Однак, згідно з академічними дослідженнями, краудсорсингові/децентралізовані дані зазвичай мають "недостатню точність, високий рівень шуму, значні упередження". Академічна спільнота у дослідженнях crowdsourcing і mobile crowdsensing зазначає:
1. Якість даних сильно коливається, шум і формат відрізняються
Різні пристрої, способи роботи та розуміння учасників призводять до великої кількості несумісних даних, які потрібно виявляти та фільтрувати.
2. Структурні упередження (bias) є повсюдними
Учасники зазвичай концентруються у певних регіонах/групах, що призводить до невідповідності вибірки реальному розподілу світу.
3. Сирі краудсорсингові дані не можна безпосередньо використовувати для тренування моделей
Дослідження у сфері автономного водіння, embodied AI, робототехніки підкреслюють: високоякісний тренувальний набір має проходити повний цикл: збір → перевірка якості → вирівнювання надлишкових даних → аугментація → доповнення довгого хвоста → корекція узгодженості міток, а не "збір і використання". (7)
Отже, мережі даних Web3 забезпечують ширше джерело даних, але "чи можна їх безпосередньо використовувати для тренування" залежить від бекендової data engineering.
Справжня цінність DePIN — це надання Physical AI "стійкої, масштабованої, дешевшої" бази даних
Web3 не вирішує одразу проблему точності даних, а радше:
● "Хто готовий довгостроково надавати дані?"
● "Як залучити більше реальних пристроїв?"
● "Як зробити збір даних стійким відкритим мережевим процесом, а не централізованим?"
Інакше кажучи, DePIN/DePAI забезпечують масштаб і покриття даних, роблячи Web3 важливою частиною "шару джерел даних" епохи Physical AI, але не єдиним гарантом якості даних.
Міжпристроєва мережа координації машин: універсальні ОС як базовий комунікаційний шар для співпраці роботів
Сьогодні індустрія робототехніки переходить від одиничного інтелекту до колективної співпраці, але залишається ключова проблема: роботи різних брендів, форм-факторів і технологічних стеків не можуть обмінюватися інформацією, не можуть взаємодіяти і не мають єдиного засобу комунікації. Це змушує багатороботну співпрацю покладатися на закриті системи виробників, що суттєво обмежує масштабування.
Останніми роками з'явився універсальний рівень операційних систем для роботів (Robot OS Layer), представлений OpenMind, який пропонує нове рішення цієї проблеми. Такі системи — це не традиційне "керуюче ПЗ", а міжмашинна інтелектуальна ОС, яка, як Android для мобільної індустрії, забезпечує спільну мову та інфраструктуру для комунікації, когніції, розуміння та співпраці між роботами.(8)
У традиційній архітектурі сенсори, контролери, модулі міркування кожного робота ізольовані, а між пристроями немає обміну семантичною інформацією. Універсальний рівень ОС через уніфіковані інтерфейси сприйняття, формат рішень і планування завдань вперше дозволяє роботам:
● Створювати абстрактний опис зовнішнього світу (vision / sound / tactile → structured semantic events)
● Уніфіковано розуміти інструкції (natural language → action planning)
● Ділитися мультимодальними станами
Це еквівалентно додаванню когнітивного шару, здатного розуміти, виражати, навчатися, на базовому рівні.
Завдяки цьому роботи перестають бути "ізольованими виконавцями", а отримують уніфікований семантичний інтерфейс і можуть входити у великі мережі співпраці машин.
Крім того, головний прорив універсальних ОС — це "міжмашинна сумісність": роботи різних брендів і форм-факторів вперше можуть "говорити однією мовою". Усі роботи можуть підключатися до єдиної шини даних і контрольного інтерфейсу через одну ОС.
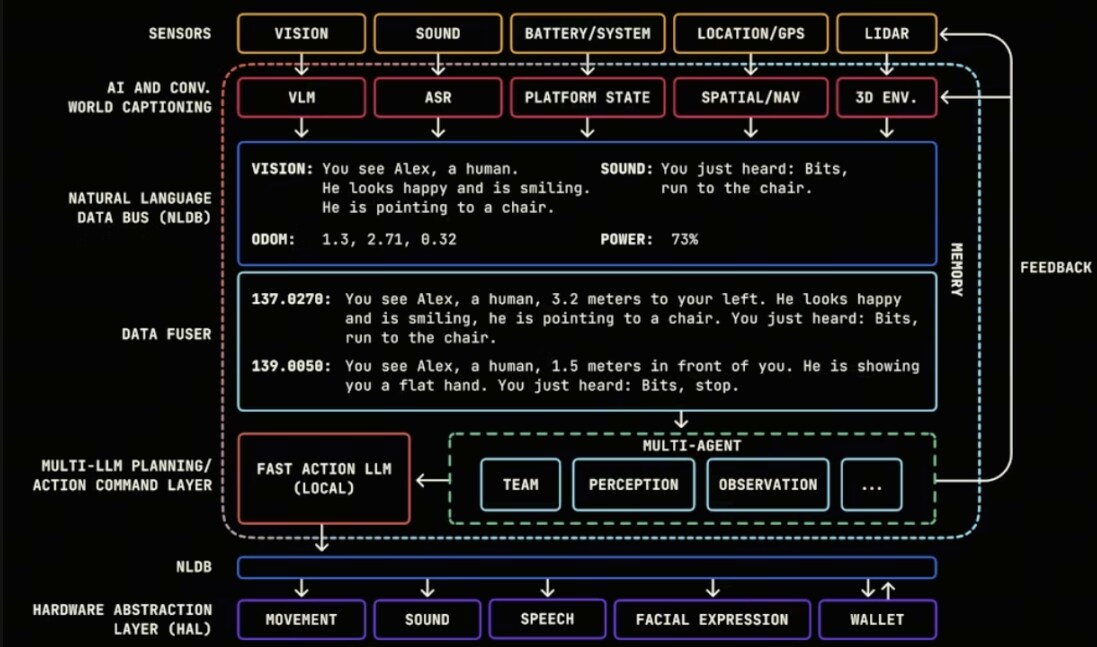
Source: Openmind
Ця міжбрендова взаємодія вперше дозволяє галузі реально обговорювати:
● Багатороботну співпрацю
● Торги та планування завдань
● Спільне сприйняття / спільні карти
● Виконання завдань у різних просторах
Передумова співпраці — "розуміння однакових форматів інформації", і універсальні ОС вирішують цю базову мовну проблему.
У системі міжпристроєвої співпраці peaq представляє інший ключовий напрямок інфраструктури: базовий протокол для забезпечення машин верифікованою ідентичністю, економічними стимулами та мережевою координацією.(9)
Він вирішує не "як роботи розуміють світ", а "як роботи як індивіди співпрацюють у мережі".
Його основні елементи:
1. Машинна ідентичність
peaq забезпечує децентралізовану реєстрацію ідентичності для роботів, пристроїв, сенсорів, що дозволяє:
● Підключатися як незалежний індивід до будь-якої мережі
● Брати участь у довірених розподілах завдань і системах репутації
Це передумова для того, щоб машина стала "мережевим вузлом".
2. Автономний економічний рахунок
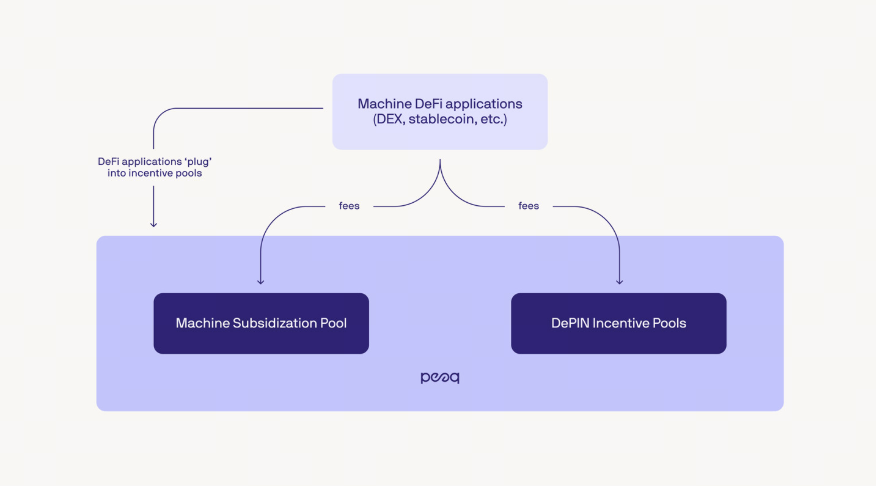
Source: Peaq
Роботи отримують економічну автономію. Завдяки нативній підтримці платежів у стейблкоїнах і автоматичній логіці білінгу роботи можуть автоматично здійснювати розрахунки та платежі без людського втручання, зокрема:
● Розрахунок за дані сенсорів за обсягом
● Оплата за виклики обчислень і моделей
● Миттєві розрахунки між роботами після надання послуг (транспортування, доставка, інспекція)
● Автономна зарядка, оренда простору тощо
Крім того, роботи можуть використовувати умовні платежі:
● Завдання виконано → автоматична оплата
● Результат не відповідає стандарту → кошти автоматично блокуються або повертаються
Це робить співпрацю роботів надійною, аудиторською та автоматично арбітрованою — ключова можливість для масштабного комерційного впровадження.
Крім того, доходи від послуг і ресурсів, які роботи надають у реальному світі, можуть бути токенізовані та відображені на блокчейні, що дозволяє відображати їхню вартість і грошові потоки у прозорій, відстежуваній, торгованій і програмованій формі, створюючи активи з машинами як суб'єктами.
Зі зрілістю AI та on-chain систем мета — дозволити машинам самостійно заробляти, платити, позичати та інвестувати, здійснювати M2M-транзакції, створювати самоорганізовану машинну економічну мережу та реалізовувати співпрацю й управління у формі DAO.
3. Координація завдань між пристроями
На вищому рівні peaq забезпечує координаційну структуру між машинами, що дозволяє:
● Ділитися статусом і інформацією про доступність
● Брати участь у торгах і підборі завдань
● Розподіляти ресурси (обчислення, мобільність, сенсорні можливості)
Завдяки цьому роботи можуть співпрацювати як вузли мережі, а не працювати ізольовано. Коли мова та інтерфейси уніфіковані, роботи можуть по-справжньому увійти у мережу співпраці, а не залишатися у закритих екосистемах.
OpenMind та подібні міжмашинні інтелектуальні ОС намагаються стандартизувати спосіб, у який роботи "розуміють світ і інструкції"; а Peaq та подібні Web3-координаційні мережі досліджують, як різні пристрої можуть отримати верифіковану організаційну співпрацю у більшій мережі. Вони лише представники багатьох спроб, що відображають прискорення галузі до уніфікованого комунікаційного шару та відкритої системи взаємодії.
Машинна економічна мережа для підтримки автономної участі машин у ринку
Якщо міжпристроєва ОС вирішує "як роботи спілкуються", координаційна мережа — "як співпрацюють", то суть машинної економічної мережі — це перетворення продуктивності роботів на стійкий капітальний потік, що дозволяє їм самостійно оплачувати свою роботу і замикати цикл.
Ключовий відсутній елемент у галузі робототехніки — "автономна економічна здатність". Традиційні роботи можуть виконувати лише задані інструкції, але не можуть самостійно розподіляти зовнішні ресурси, встановлювати ціни на свої послуги чи розраховувати витрати. У складних сценаріях вони повинні покладатися на бекенд людини для бухгалтерії, затвердження та планування, що суттєво знижує ефективність співпраці та ускладнює масштабування.
x402: надання роботам "статусу економічного суб'єкта"
Source: X@CPPP2443_
x402 як новий стандарт Agentic Payment надає роботам цю фундаментальну можливість. Роботи можуть безпосередньо через HTTP надсилати платіжні запити і здійснювати атомарні розрахунки у USDC та інших програмованих стейблкоїнах. Це означає, що роботи можуть не лише виконувати завдання, а й самостійно купувати всі необхідні для цього ресурси:
● Виклик обчислень (LLM inference / керуючі моделі)
● Доступ до локацій і оренда обладнання
● Послуги інших роботів
Вперше роботи можуть автономно споживати та виробляти як економічні суб'єкти.
Останніми роками співпраця між виробниками роботів і криптоінфраструктурою дає показові приклади, що свідчить про перехід машинної економічної мережі від концепції до впровадження.
OpenMind × Circle: роботи отримують нативну підтримку стейблкоїн-платежів

Source: Openmind
OpenMind інтегрує свою міжпристроєву ОС роботів із USDC від Circle, дозволяючи роботам безпосередньо здійснювати платежі та розрахунки у стейблкоїнах у ланцюжку виконання завдань.
Це два прориви:
1. Ланцюжок виконання завдань роботів може нативно підключатися до фінансових розрахунків, більше не покладаючись на бекенд
2. Роботи можуть здійснювати "безкордонні платежі" у кросплатформеному, міжбрендовому середовищі
Для співпраці роботів це базова можливість для переходу до автономної економіки.
Kite AI: створення Agent-Native блокчейн-інфраструктури для машинної економіки
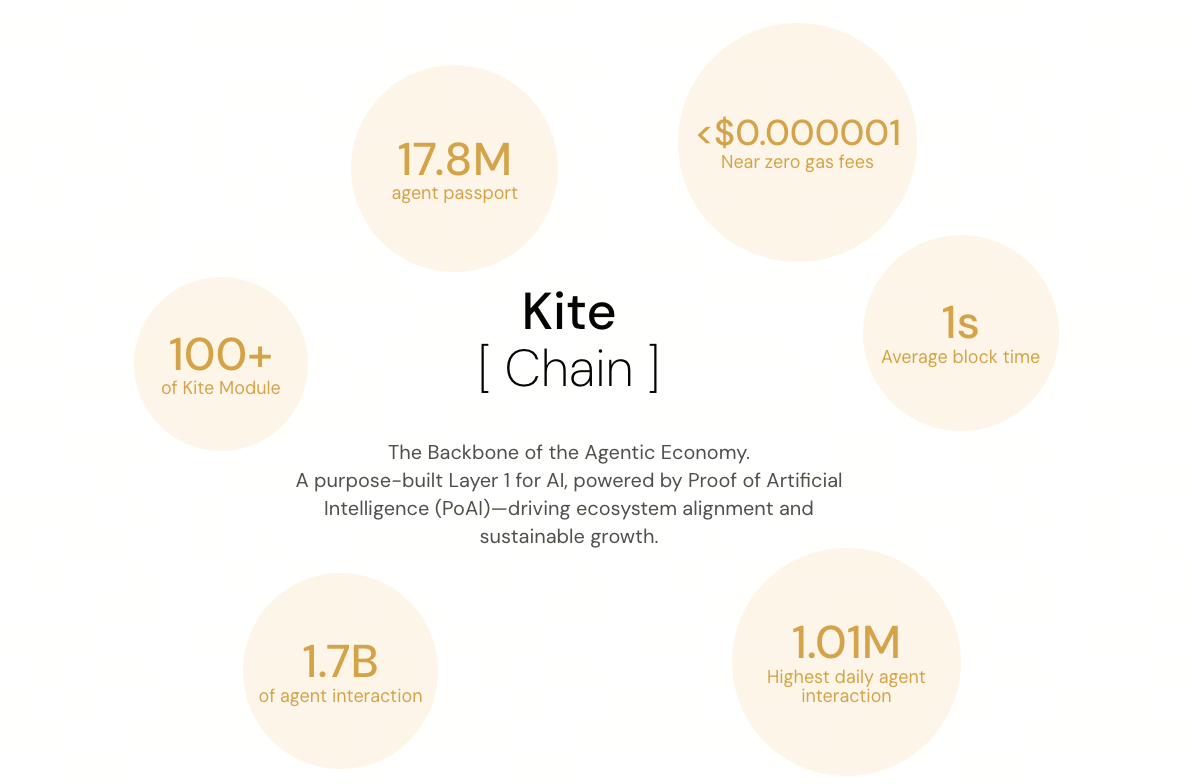
Source: Kite AI
Kite AI ще далі просуває фундамент машинної економіки: він спеціально розробляє on-chain ідентичність, комбіновані гаманці, автоматизовану платіжну та розрахункову систему для AI agents, дозволяючи агентам автономно здійснювати різні транзакції на блокчейні.(10)
Він забезпечує повне "середовище автономної економіки агентів", що ідеально відповідає потребам роботів у самостійному ринковому функціонуванні.
1. Шар ідентичності Agent / машини (Kite Passport): кожному AI Agent (у майбутньому — і конкретному роботу) видається криптоідентичність і багаторівнева система ключів, що дозволяє точно контролювати "хто витрачає гроші", "від чийого імені діє", і підтримує миттєве відкликання та відповідальність — це передумова для розгляду Agent як незалежного економічного суб'єкта.
2. Нативна підтримка стейблкоїнів + вбудований x402: Kite інтегрує x402 payment standard на рівні блокчейну, використовуючи USDC та інші стейблкоїни як активи за замовчуванням, дозволяючи Agent здійснювати відправку, отримання та звірку через стандартизовану intent-авторизацію, оптимізовану для високочастотних, дрібних, machine-to-machine платежів (субсекундне підтвердження, низькі комісії, аудит).
3. Програмовані обмеження та управління: через on-chain політики можна встановлювати ліміти витрат для Agent, дозволені торговці/контракти, правила ризик-менеджменту та аудиторські сліди, що дозволяє знайти баланс між безпекою та автономією при "відкритті гаманця для машини".
Інакше кажучи, якщо ОС OpenMind дозволяє роботам "розуміти світ і співпрацювати", то блокчейн-інфраструктура Kite AI дозволяє роботам "виживати в економічній системі".
Завдяки цим технологіям машинна економічна мережа створює "стимулювання співпраці" та "замкнуту цінність", дозволяючи роботам не лише "платити", а й:
● Отримувати дохід за результатами (result-based settlement)
● Купувати ресурси за потребою (автономна структура витрат)
● Брати участь у ринковій конкуренції з on-chain репутацією (verifiable fulfillment)
Це означає, що роботи вперше можуть брати участь у повній системі економічних стимулів: можуть працювати → можуть заробляти → можуть витрачати → можуть самостійно оптимізувати поведінку.
Висновок
Перспективи
З огляду на три основні напрямки, роль Web3 у робототехнічній індустрії стає дедалі яснішою:
● Дані: забезпечення масштабованої, багатоджерельної мотивації для збору даних і покращення покриття довгого хвоста;
● Співпраця: впровадження уніфікованої ідентичності, взаємодії та механізмів управління завданнями для міжпристроєвої співпраці;
● Економіка: забезпечення програмованої економічної поведінки роботів через on-chain платежі та верифіковані розрахунки.
Ці можливості разом закладають основу для майбутнього потенційного Інтернету машин, дозволяючи роботам співпрацювати та працювати у більш відкритому, аудиторському технологічному середовищі.
Невизначеності
Хоча екосистема роботів у 2025 році переживає рідкісний прорив, на шляху від "технологічної здійсненності" до "масштабованості та стійкості" залишається багато невизначеностей. Вони не пов'язані з окремими технологічними вузлами, а виникають через складне переплетення інженерних, економічних, ринкових і інституційних факторів.
Чи справді економічна доцільність існує
Попри прориви у сприйнятті, контролі та інтелекті, масштабне впровадження роботів зрештою залежить від реального комерційного попиту та економічної віддачі. Наразі більшість гуманоїдних і універсальних роботів залишаються на стадії пілотних проектів і перевірки; чи готові компанії платити за роботизовані послуги у довгостроковій перспективі, чи зможуть моделі OaaS/RaaS стабільно забезпечувати ROI у різних галузях — поки що бракує достатньої довгострокової статистики.
Крім того, співвідношення ціни і якості роботів у складних, неструктурованих середовищах ще не повністю доведено. У багатьох випадках традиційна автоматизація чи ручна праця все ще дешевші й надійніші. Це означає: технологічна здійсненність не автоматично перетворюється на економічну неминучість, а невизначеність комерціалізації безпосередньо впливатиме на темпи розширення галузі.
Системні виклики інженерної надійності та складності обслуговування
Найбільший реальний виклик для індустрії робототехніки — не "чи може виконати завдання", а "чи може працювати довго, стабільно та дешево". У масштабних впровадженнях такі питання, як відсоток відмов апаратного забезпечення, вартість обслуговування, оновлення ПЗ, управління енергоспоживанням, а також питання безпеки та відповідальності, швидко перетворюються на системні ризики.
Навіть якщо OaaS знижує початкові капітальні витрати, приховані витрати на обслуговування, страхування, відповідальність і комплаєнс можуть з'їсти всю бізнес-модель. Якщо надійність не досягне мінімального порогу для комерційних сценаріїв, мережі роботів і машинна економіка залишаться лише концепцією.
Екосистемна координація, конвергенція стандартів і адаптація інституцій
Екосистема роботів одночасно переживає швидку еволюцію ОС, Agent-фреймворків, блокчейн-протоколів, платіжних стандартів, але наразі вона дуже фрагментована. Вартість співпраці між пристроями, виробниками, системами залишається високою, загальні стандарти ще не конвергували, що може призвести до розриву екосистеми, дублювання зусиль і втрати ефективності.
Водночас роботи з автономним прийняттям рішень і економічною поведінкою кидають виклик чинним нормативним і правовим рамкам: відповідальність, платіжний комплаєнс, межі даних і безпеки залишаються неясними. Якщо інститути та стандарти не встигатимуть за технологічною еволюцією, машинна економічна мережа зіткнеться з невизначеністю у питаннях комплаєнсу та впровадження.
Загалом, умови для масштабного впровадження роботів поступово формуються, а зародки машинної економічної системи вже проявляються у галузевій практиці. Web3 × Robotics хоч і перебуває на ранній стадії, але вже демонструє довгостроковий потенціал, на який варто звернути увагу.
Джерела
Відмова від відповідальності: зміст цієї статті відображає виключно думку автора і не представляє платформу в будь-якій якості. Ця стаття не повинна бути орієнтиром під час прийняття інвестиційних рішень.
Вас також може зацікавити
Ethereum L1 досягає рекорду 2025 року з понад 1,9 мільйона щоденних транзакцій
BlackRock раптово переміщує $428 мільйонів у Bitcoin та Ethereum
Чарльз Хоскінсон: Ви не можете так обманювати на Bitcoin та Cardano
Ripple могла продавати стільки XRP, скільки хотіла, заявив CTO